Recently we've been testing a simple peak hold for the KerberosSDR passive radar display. This results in some nice graphs that show aircraft and vehicle activity over time.
Passive radar works by using already existing transmitters such as those for HDTV and listening for reflections that bounce off of RF reflective objects. With a two antenna setup, it is possible to generate a bistatic range/doppler speed graph of reflected objects.
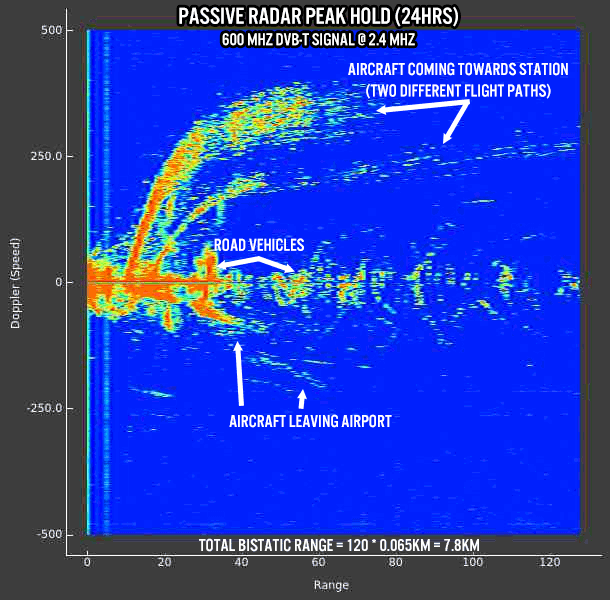
With the reference Yagi antenna pointed towards a 600 MHz DVB-T tower, and the surveillance antenna pointed to an airport we were able to obtain the graph below. The top two large traces show aircraft heading towards our station, whereas the bottom traces show aircraft leaving the airport. Also visible are multiple blips with smaller doppler speeds, and these correspond to vehicles.
KerberosSDR Passive Radar Display Peak Hold
The code on the KerberosSDR git will be updated in a few days time. We are also working on a more comprehensive passive radar tutorial that will try to explain concepts like processing gain, bistatic ranges and other important tips for getting good passive radar results. At the same time we're also working on improving direction finding ease of use by prototyping antenna switches for calibration, and working on getting 4-channel beamformed passive radar working which will allow us to plot passive radar returns on a real map.
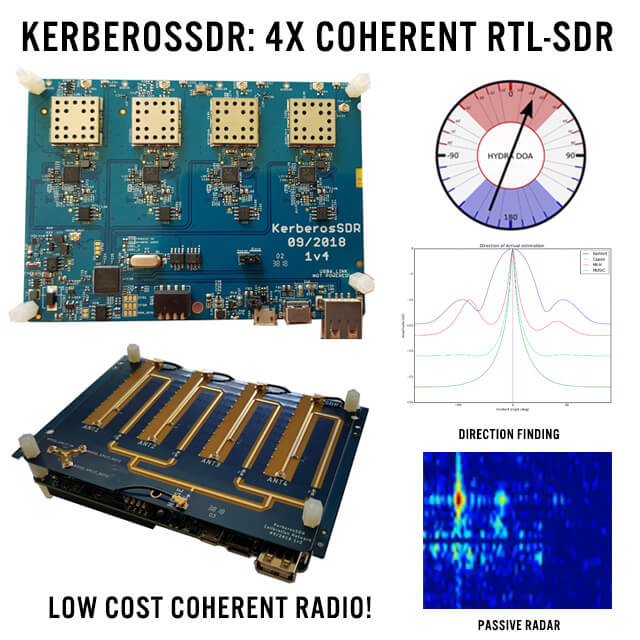
The KerberosSDR is our 4-channel phase coherent capable RTL-SDR unit that we previously crowdfunded back in 2018. With a 4-channel phase coherent RTL-SDR interesting applications like radio direction finding, passive radar and beam forming become possible. It can also be used as 4 separate RTL-SDRs for multichannel monitoring. KerberosSDR is currently available from the Othernet store and Hacker Warehouse for US$149.95.
Over on YouTube Meine Videokasetten has posted a video showing how he's been using an RTL-SDR to detect aircraft landing and taking off via the scatter on a VOR beacon. VOR (aka VHF Omnidirectional Range) is a navigational beacon that is transmitted between 108 MHz and 117.95 MHz from a site usually at an airport. Although as it is an older technology it is slowly being phased out in some places.
An interesting observation can be made that is unrelated to the actual operation and use of VOR navigation. When an aircraft passes near the VOR beacon it results in the signal reflecting and scattering off the metal aircraft body. As the aircraft is moving quickly, it also results in a frequency doppler shift that can be seen on an RF waterfall display.
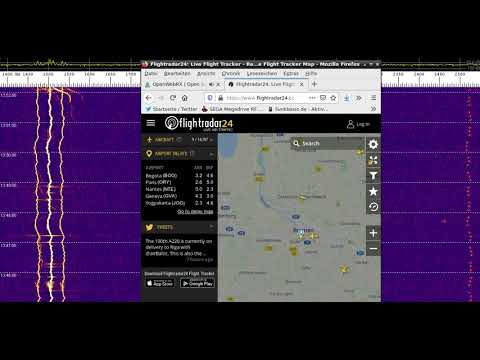
In his video Meine Videokasetten uses an RTL-SDR and OpenWebRX to receive the VOR signal. He then pipes the audio output of that signal into Speclab which allows him to get significantly increased FFT resolution for the waterfall. This increased resolution allows him to clearly see the doppler scattering effects of aircraft on the VOR transmission. He notes that it's possible from the scattering to determine if an aircraft is taking off or landing.
Passive doppler radar on VOR beacon transmitter .:°:. A let's test it out
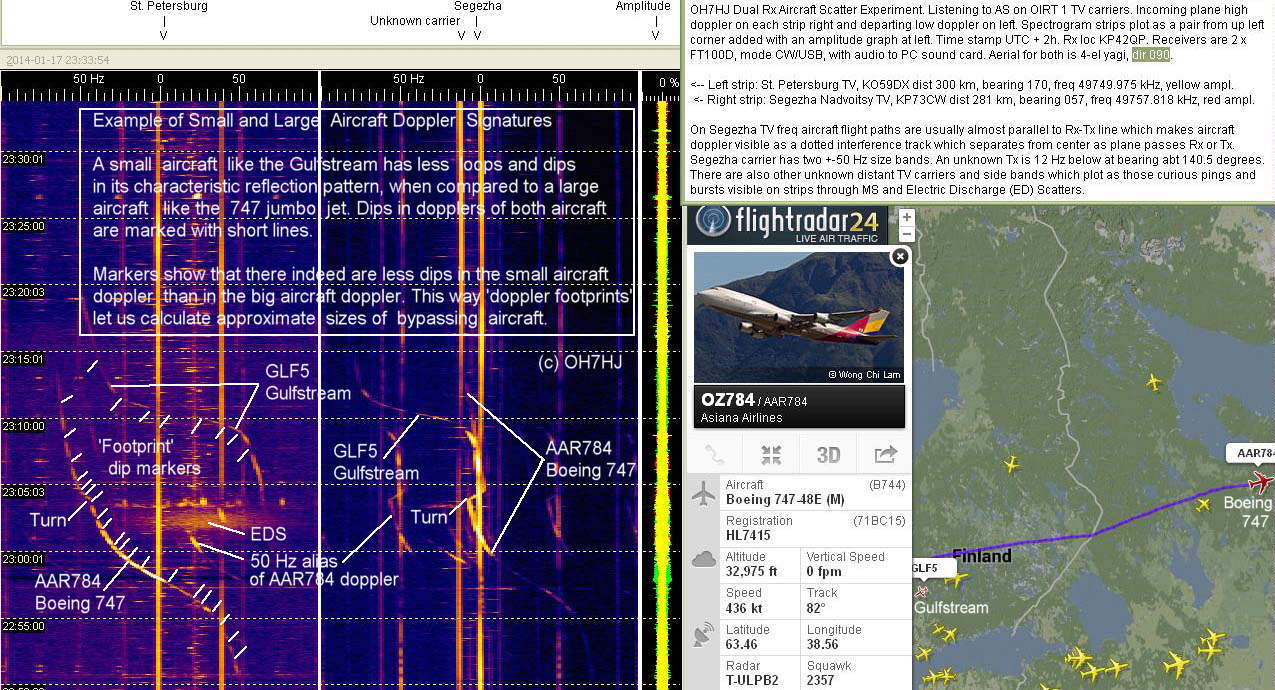
We note that back in 2015 we posted about the ability to "fingerprint" aircraft using this technique. Different types of aircraft will result in unique patterns on the waterfall. In that post they used analogue TV carriers which are not very common in most countries anymore, so it's good to see that this can be used with VOR signals too.
Comparing large and small aircraft with aircraft scatter with an analogue TV transmitter. From previous post.
KerberosSDR is our four tuner coherent RTL-SDR product made in collaboration with Othernet. With KerberosSDR applications like radio direction finding and passive radar are possible, and our free open source demo software helps to make it easier to get started exploring these applications. In this post we explore how a simple passive radar setup can be used to measure how busy a neighborhood is in terms of vehicular traffic.
Passive radar makes use of already existing strong 'illuminator' signals such as broadcast FM, DAB, digital TV and cellular. When these signals reflect off a moving metallic object like an aircraft or vehicle, it distorts the signal slightly. By comparing the distorted signal to a clean signal we can determine the distance and speed of the object causing the reflection. Wide reaching digital signals like DVB-T and DAB are often the best illuminators to use. Wideband cellular signals can also be used to detect more local targets.
In a simple passive radar system we use two directional antennas such as Yagi's. One Yagi points towards the broadcast tower and receives the clean non-distorted reference signal. This is known as the reference channel. A second Yagi points towards the area you'd like to monitor for reflections, and this is called the surveillance channel.
In our setup we point the reference channel Yagi towards a 601 MHz DVB-T transmitter roughly 33 km away. A second Yagi is placed on a vantage point overlooking a neighborhood. The Yagi's used are cheap DVB-T TV Yagi's that can be found in any electronics or TV retail store (or on Amazon for ~$30 - $60 USD). In the software we used a bandwidth of 2.4 MHz and adjusted the gains for maximum SNR.
It is important that the surveillance channel is isolated from the reference signal as much as possible. We improve the isolation simply by placing a metal sheet next to the surveillance Yagi to block the reference DVB-T signal more. Note that putting the antennas outside will obviously result in much better results. These walls and windows contain metal which significantly reduce signal strength. We also added our RTL-SDR Blog wideband LNA to the surveillance channel powered by a cheap external bias tee to improve the noise figure of the surveillance channel.
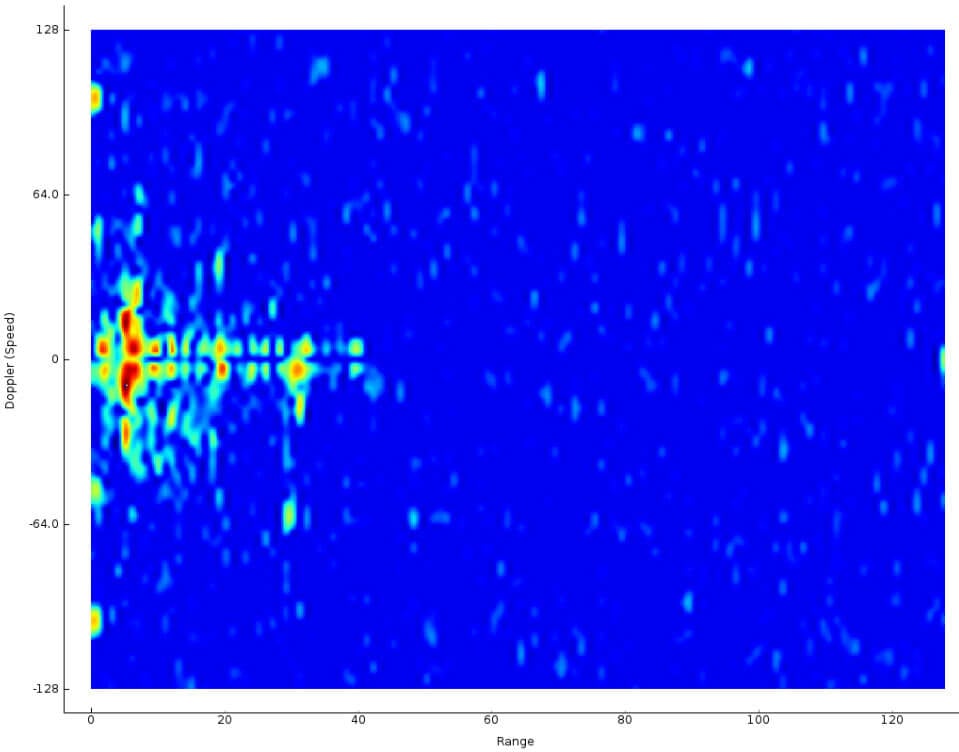
The resulting passive radar display shows us a live view of objects reflecting. Each dot on the display represents a moving vehicle that is reflecting the DVB-T surveillance signal. In the image shown below the multiple colored objects in the left center are vehicles. The X-Axis shows the distance to the object, and the Y-Axis shows the doppler speed. Both axes are relative to the observation location AND the transmit tower location.
Vehicles on the Passive Radar Display
When there are more moving cars on the road during the day and rush hours, there are more blips seen on the passive radar display. Larger vehicles also produce larger and stronger blips. By simply summing the matrix that produces this 2D display, we can get a crude measurement of how busy the neighborhood is, in terms of cars on the road since reflections are represented by higher values in the matrix. We logged this busyness value over the course of a day and plotted it on a graph.
The resulting graph is as you'd intuitively expect. At 6AM we start to see an increase in vehicles with people beginning their commute to work. This peaks at around 8:30AM - 9am with parents presumably dropping their kids off to the neighborhood school which starts classes at 9AM. From there busyness is relatively stable throughout the day. Busyness begins to drop right down again at 7PM when most people are home from work, and reaches it's minimum at around 3am.
Traffic Busyness detected with KerberosSDR Passive Radar
One limitation is that this system cannot detect vehicles that are not moving (i.e. stuck in standstill traffic). Since the doppler speed return will be zero, resulting in no ping on the radar display. The detection of ground traffic can also be distorted by aircraft flying nearby. Aircraft detections result in strong blips on the radar display which can give a false traffic result.
It would also be possible to further break down the data. We could determine the overall direction of traffic flow by looking at the positive and negative doppler shifts, and also break down busyness by distance and determine which distances correspond to particular roads. In the future we hope to be able to use the additional channels on the KerberosSDR to combine passive radar and direction finding, so that the the blips can actually be directly plotted on a map.
If you want to try something similar on the KerberosSDR software edit the RD_plot function in the _GUI/hydra_main_window.py file, and add the following simple code before CAFMatrix is normalized. You'll then get a log file traffic.txt which can be plotted in excel (remember to convert Unix time to real time and apply a moving average)
We just wanted to note that this Monday the reduced preorder pricing of US$130 + shipping will end, and the price will rise to the retail price of $149.95 + shipping. So if you have been thinking about ordering a unit, now would be a good time. Ordering is currently possible through Indiegogo. On Monday we will change to our own store. EDIT: Now available to purchase on the Othernet Store.
For shipping, US orders will be sent domestically from Othernet's office in Chicago. They are still waiting on the US shipment to arrive, but it is expected to arrive by the end of next week. Once shipped locally you will receive a shipment notification.
For international orders, the packages are being labelled now, and should be going out early next week, or sooner.
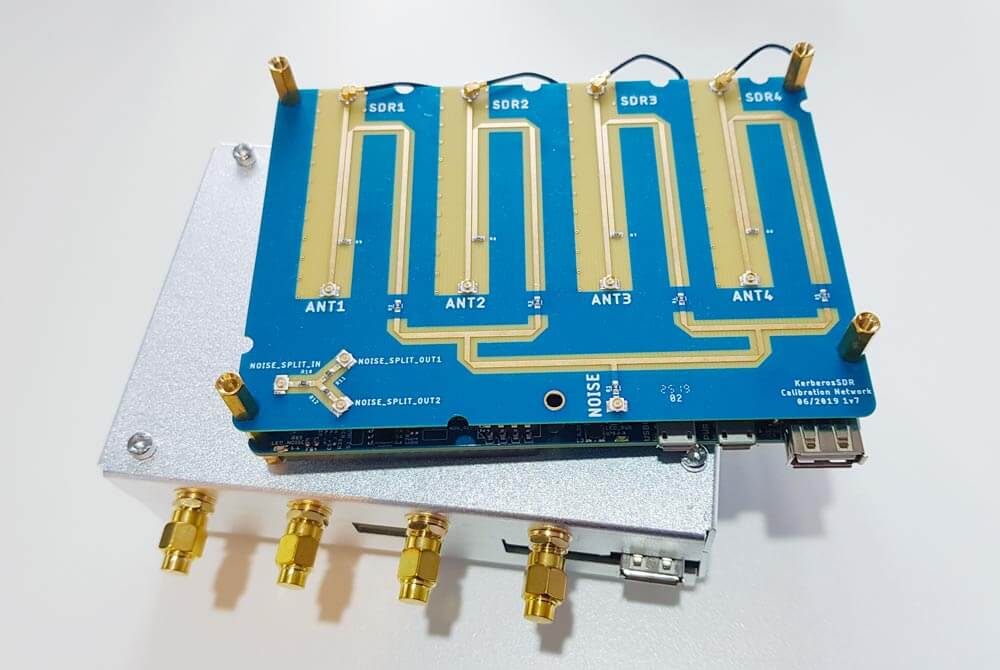
KerberosSDR Inside and Outside the Enclosure
Future Updates to KerberosSDR
With the profits raised from KerberosSDR sales we are looking to continue funding development on the open source server software and visualization software being created (as well as applying updates ourselves). In future updates we will be looking at features such as:
Streamlining the sample and phase sync calibration process.
Experimenting with software notch filters for calibration (may reduce the need to disconnect the antennas during calibration).
Reworking the buffering code for improved sample ingestion performance and increased averaging.
Direction finding and passive radar algorithm improvements.
Creating a networked web application for combining data from two or more physically distributed KerberosSDRs over the internet for immediate TX localization.
Updates and bug fixes for the Android mobile direction finding app for use in vehicles.
Improving passive radar to be able to use all four RX ports for surveillance so that larger areas can be covered.
Plotting passive radar pings on a map.
Beginning experimentation with beam forming.
In the farther future we hope to eventually have even more clever software that can do things like locate multiple signals in the bandwidth at once, automatically plot them on a map, and track them via their unique RF fingerprint, or other identifiers.
Future hardware updates may see more streamlined calibration and smaller sizes.
If you weren't aware, KerberosSDR is our recently released 4x Coherent RTL-SDR which can be used for tasks such as direction finding and passive radar. KerberosSDR was successfully crowdfunded over on Indiegogo, and we have recently completed shipments to all backers. Currently there is only about 20 units of the batch one production left in stock.
We are currently offering discounted preorders for batch two units on Indiegogo which we expect will be ready to ship in July or hopefully earlier. If you are interested, please order soon to avoid missing out as the price will be raised again once we are shipping. Batch two will be the same as batch one except for some minor changes. For example we have decided to convert the microUSB port into a USB-C port as we have found that there are many very poor quality microUSB cables on the market which could cause issues for users. USB-C cables are generally of a higher quality.
More information about KerberosSDR is available on the Indiegogo page.
KerberosSDR Updates
Since our last post on this blog about KerberosSDR we have made some enhancements to the software.
The KerberosSDR code is now fast enough to run at 1-2 Hz update rates for direction finding and passive radar on a Raspberry Pi 3 B+.
There is now a web interface, so the KerberosSDR can be controlled via a WiFi hotspot and internet browser. Useful for use on the Pi 3 and Tinkerboard.
For future updates we are currently working on several new features:
Filters to remove low confidence DoA results on the Android app.
A secondary heatmap type display on the Android app based on signal strength, for two direction finding indications.
Methods to determine the center of multiple bearing intersection points.
Further enhancements to processing speed, possible improved results from processing gain and possible better accuracy from improved DoA algorithms.
Within the next few weeks we will also release full tutorial videos that will show how to set up and use the KerberosSDR for direction finding and passive radar with a Raspberry Pi 3 or Tinkerboard. If you prefer a text based explanation we already have a guide up at rtl-sdr.com/ksdr.
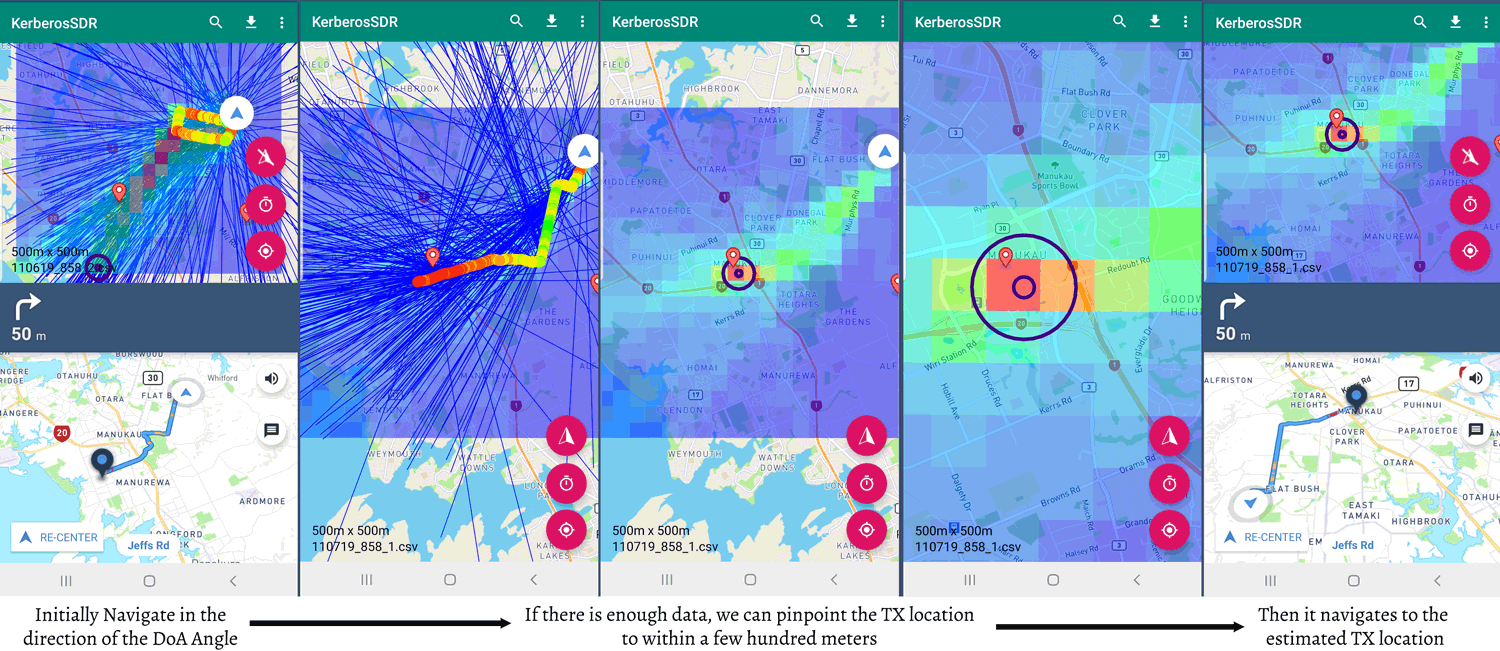
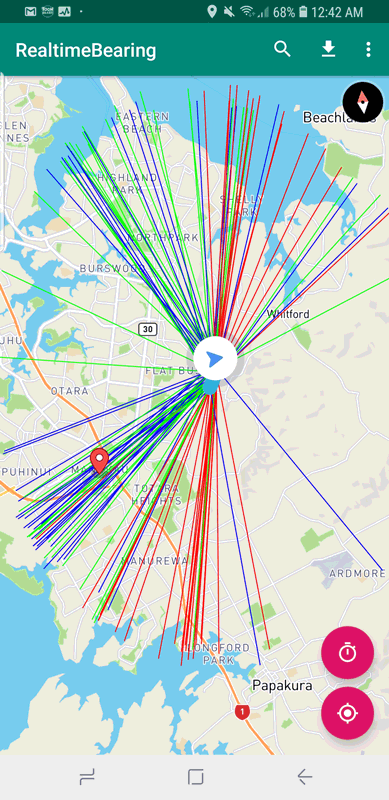
Below is an image that demonstrates the KerberosSDR direction finding Android app. A user of KerberosSDR has also submitted two of his own screenshots that show that he was able to determine the location of a GSM transmitter with a linear antenna array.
KerberosSDR Direction Finding Results. Multiple data points collected during a drive, with bearings pointing towards the TX tower (red marker). Circular array of whip antennas used at freq. 858 MHz.
If you weren't already aware, over the past few months we've been working with the engineering team at Othernet.is to create a 4x Coherent RTL-SDR that we're calling KerberosSDR. A coherent RTL-SDR allows you to perform interesting experiments such as RF direction finding, passive radar and beam forming. In conjunction with developer Tamas Peto, we have also had developed open source demo software for the board, which allows you to test direction finding and passive radar. The open source software also provides a good DSP base for extension.
If you're interested and missed out in the early campaign, don't worry we still have about 250 units left from this batch for sale at a price of $140 + shipping over on our Indiegogo Campaign.
Demo Program Updates
Over the past few weeks we've been working on a few code speed improvements to the demo software, and we now believe that it should be fast enough to run on a Pi 3 B+ at decent update rates. In particular the passive radar display frame rate has been improved and we're able to get about 1 FPS on a Tinkerboard now.
We will soon release the full code, but for now you can see the main two libraries developed by Tamas' that are used in the KerberosSDR code. These libraries contain the direction finding and passive radar processing algorithms.
pyAPRIL - Python Advanced Passive Radar Library. Available on PyPi and GitHub
pyArgus - Python Beamforming and Direction Finding Algorithms. Available on PyPi and GitHub.
Android Direction Finding Companion App Updates
Over the holidays we've been working on a simple companion Android app for the direction finding feature. Using the GPS and/or compass sensors on the Android phone, and the transmitter bearing given by the KerberosSDR we can plot a bearing towards the transmitter that we are tuned to.
The phone connects to a laptop/SBC WiFi hotspot running the KerberosSDR Linux software, and reads the bearing via a simple php HTML server.
Driving around with the KerberosSDR gives better results than when stationary as we can take multiple readings at different points which helps to average out multipath distortions.
In the image below we used a linear antenna array of four dipoles attached to the windscreen of a car. KerberosSDR was tuned to a TETRA transmitter at 858 MHz.
We drove down a street and then back up it. The red lines indicate the direction of the car as determined by GPS, the blue lines indicate the forward direction towards the transmitter, and the green lines the reverse direction. (a linear antenna array won't know if the transmitter is in front or behind it).
You can see that the majority of blue/green lines point towards the TETRA transmitter which we've marked with a red location marker at the known location.
KerberosSDR Results from a Linear Antenna Array of Dipoles
Getting a bearing from GPS requires that you are moving. However if you are stationary it is also possible to use the compass sensor in the Android app, but Android compass sensors are not particularly accurate.
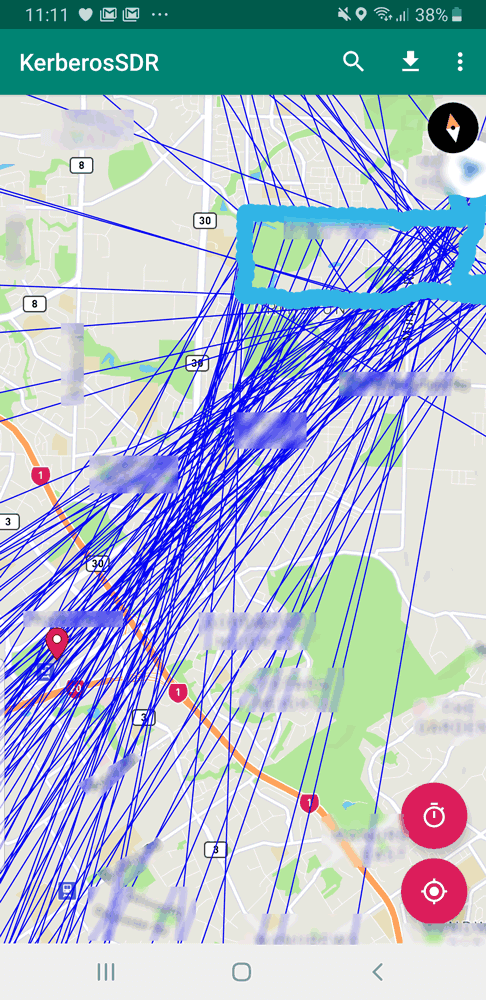
We also tested the app with a circular array of antennas and found it to work well too. A circular array has the benefit over a linear array of providing only one direction towards the detected signal, but may be more susceptible to multipath issues. In our test the circular array was simply four magnetic whips placed on top of a car.
KerberosSDR using Whip Antennas in a Circular Array on a Vehicle
This time we then drove around for a longer time while logging the data in the Android app. We can see that the majority of blue lines point towards the known transmitter location. Blue lines pointing away from the transmitter may be due to multipath or a briefly incorrect GPS heading (e.g. during a turn). Sometimes reflections or refractions of the signal can be more likely to be picked up if the direct path to the transmitter is really blocked. However if you have enough data points from driving around, it becomes much more clear where the actual transmitter is.
KerberosSDR Results from the Circular Array
Manufacturing Updates
We now have some pictures of the boards being manufactured at the factory. Unfortunately we are behind our initial shipping target of mid-Jan due to the previous unexpected payment delays from Indiegogo, and because of this we may hit the Chinese New Year holidays which could delay us further as factories take a 2 week holiday starting late Jan. We're really hoping to have them shipped off just before then, but we don't know if we can beat the clock. I know some of you are anxious to get started with KerberosSDR, and so I do apologize for the delay.
KerberosSDR in it's metal case (no screen printing yet)
Just a reminder that one week remains in the KerberosSDR Indiegogo campaign. This is your last chance to grab a KerberosSDR at a discounted preorder price. And at the time of posting there are still 50 "second early bird" units remaining at a discounted price of only $115 USD.
If you weren't already aware, over the past few months we've been working with the engineering team at Othernet.is to create a 4x Coherent RTL-SDR that we're calling KerberosSDR. A coherent RTL-SDR allows you to perform interesting experiments such as RF direction finding, passive radar and beam forming. In conjunction with developer Tamas Peto, we have also had developed open source demo software for the board, which allows you to test direction finding and passive radar. The open source software also provides a good DSP base for extension.
Due to the higher than anticipated number of preorders, we have been able to immediately fund further work on improving the demo software, and will be able to continue to work on improving it throughout this and next year. First on the agenda is improving the code buffering structure and DSP processing speed. Shortly after we'll be looking at adding additional features to aide with calibration and direction finding.
We have also now begun ordering parts, begun prototyping the metal enclosure, and have finalized the PCB. Manufacturing is on track to begin shortly after the campaign ends.
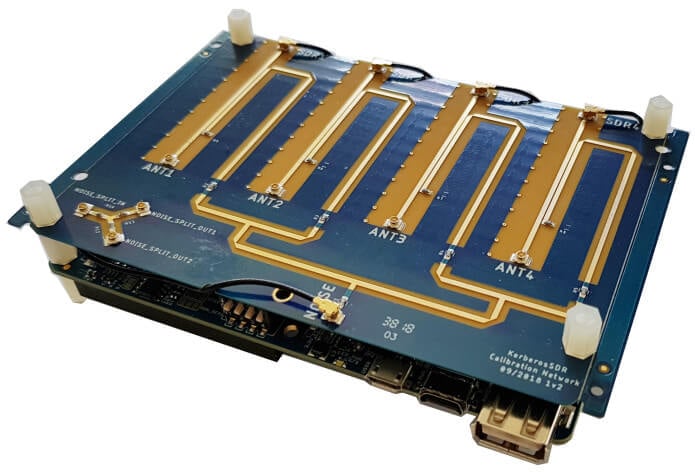
KerberosSDR Prototype with Calibration Board Attached (Metal Enclosure with SMA connectors Not Shown)
KerberosSDR is our upcoming low cost 4-tuner coherent RTL-SDR. With four antenna inputs it can be used as a standard array of four individual RTL-SDRs, or in coherent applications such as direction finding, passive radar and beam forming. More information can be found on the KerberosSDR main post. Please remember to sign up to our KerberosSDR mailing list on the main post or at the end of this post, as subscribers will receive a discount coupon valid for the first 100 pre-order sales. The list also helps us determine interest levels and how many units to produce.
In this post we're showing some more passive radar demos. The first video is a time lapse of aircraft coming in to land at a nearby airport. The setup consists of two DVB-T Yagi antennas, with KerberosSDR tuned to a DVB-T signal at 584 MHz. The reference antenna points towards a TV tower to the west, and the surveillance antenna points south. Two highlighted lines indicate roughly where reflections can be seen from within the beam width (not taking into account blockages from mountains, trees etc).
The second video shows a short time lapse of a circling helicopter captured by the passive radar. The helicopter did not show up on ADS-B. On the left are reflections from cars and in the middle you can see the helicopter's reflection moving around.
We are expecting to receive the final prototype of KerberosSDR within the next few weeks. If all is well we may begin taking pre-orders shortly after confirming the prototype.











{kind=link}