Scanner Command: Mapping Incidents from Live Radio Calls and ADS-B to Airband Voice with AI
Recently, we posted about DeepSDR, which is a program that automatically transcribes voice data from public safety radio communications and uses an LLM to categorize and plot incidents on a map as they happen.
In that post, we noted that we expect to see more projects like this soon, and sure enough, another program called "Scanner Command" with a similar angle has been submitted to the blog by author Benjamin Blood. Like DeepSDR the software listens to public safety and then uses voice transcription and an LLM to automatically understand, categorize and map incidents on the map. One additional feature that Scanner Command has is a fun tool that correlates ADS-B data with airband voice. Benjamin explains it best:
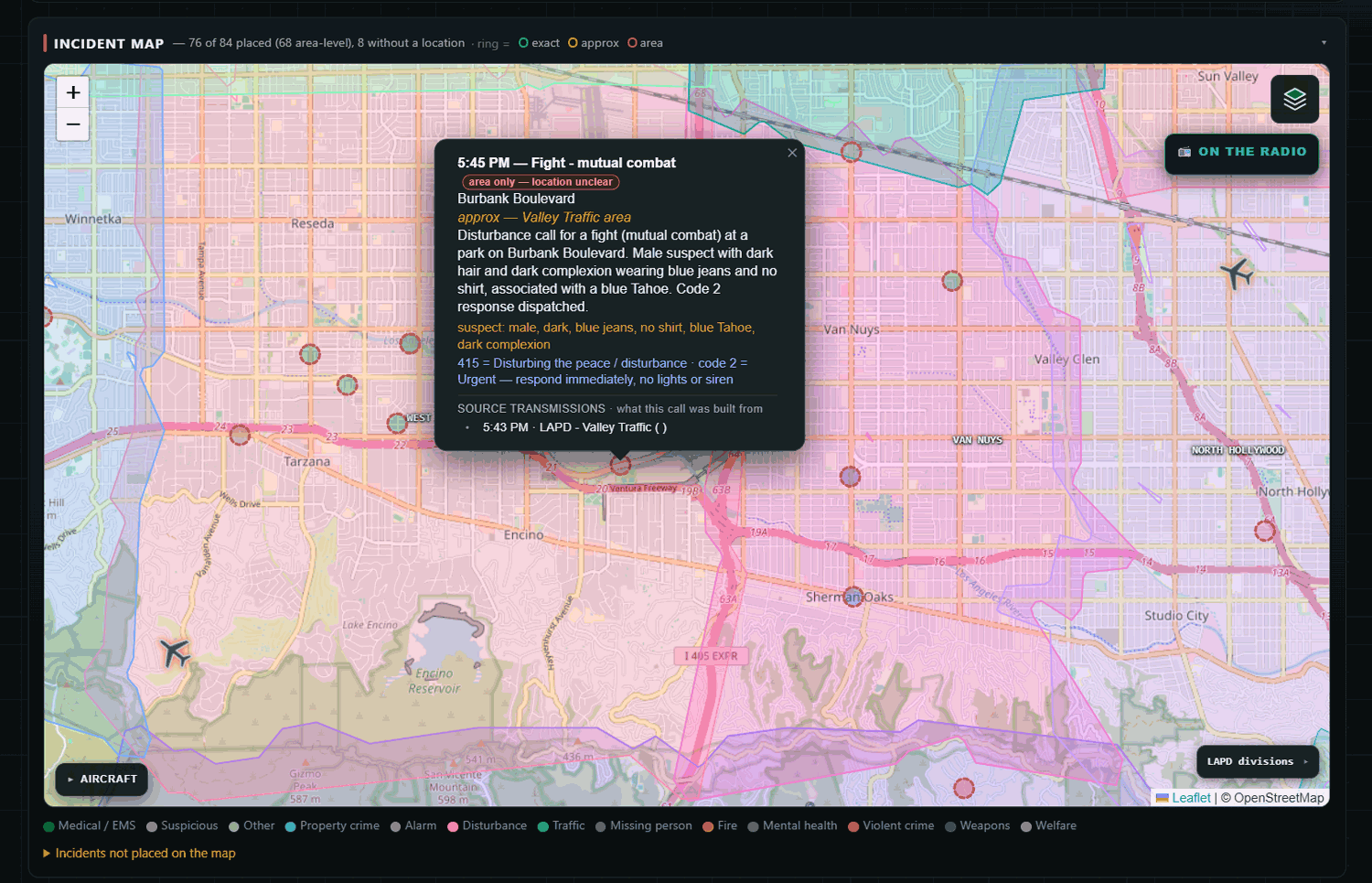
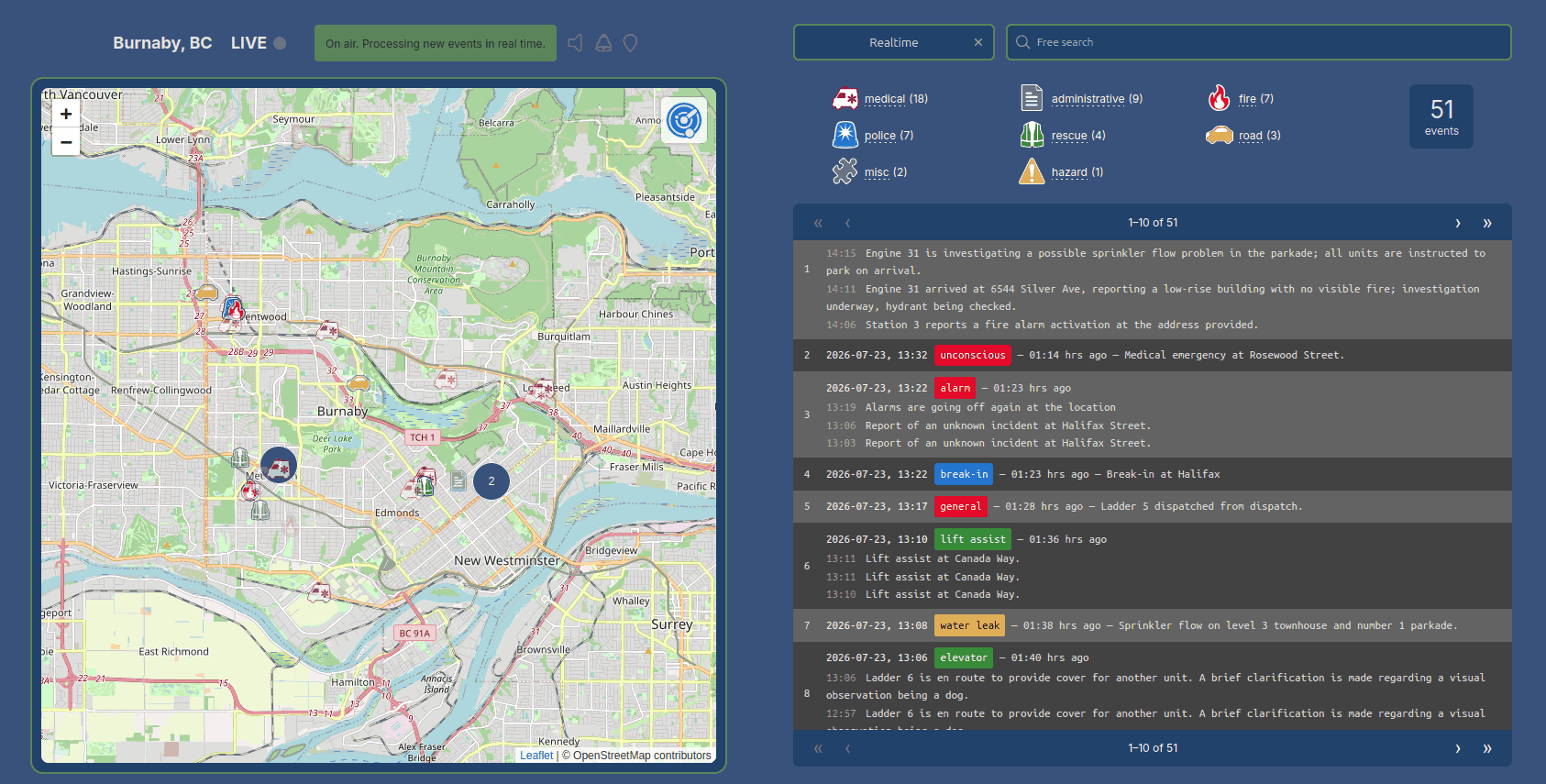
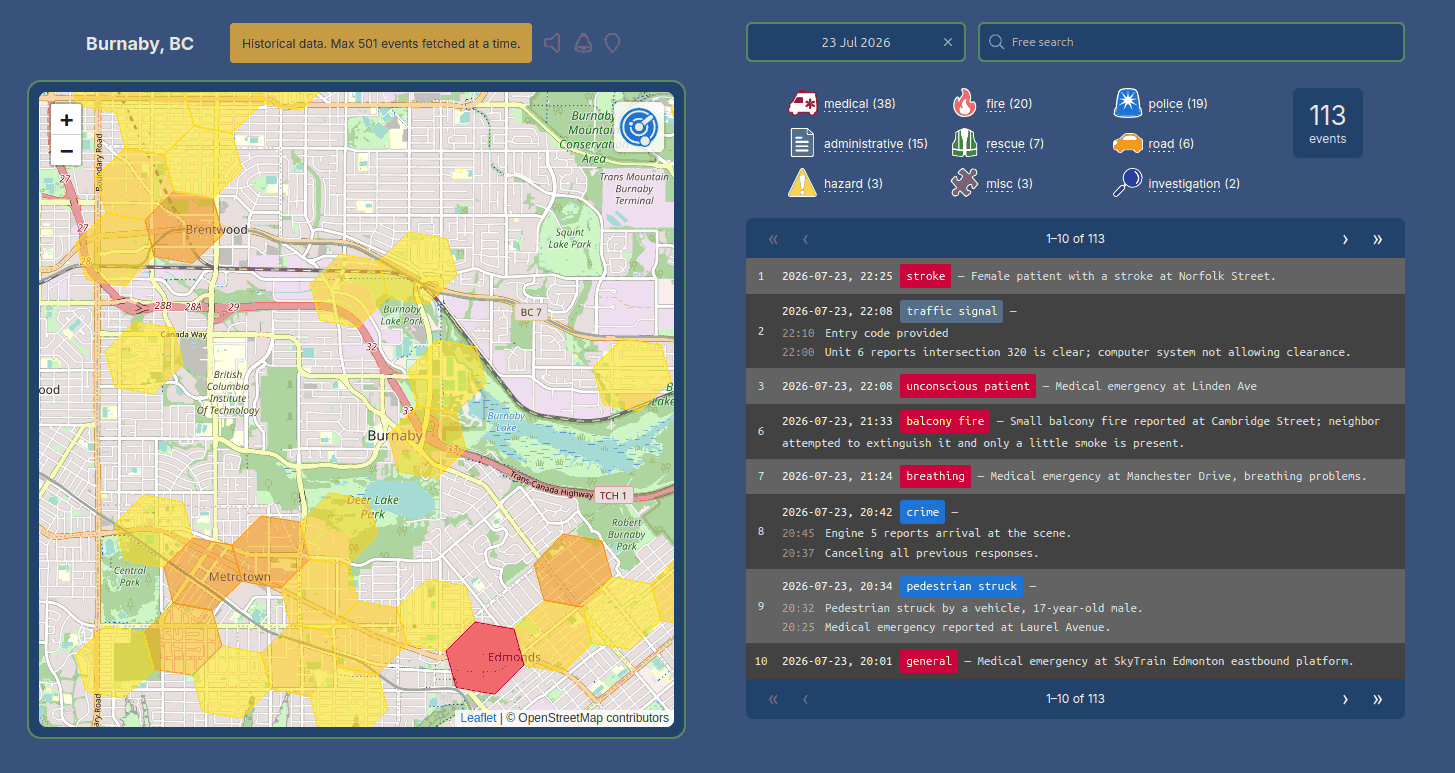
Scanner Command turns a radio scanner into a live AI incident map. A Uniden SDS200 covers the trunked digital public safety side (the LA area's P25 Phase II system, with ProScan driving the scanner and handing off every recording), and two $45 RTL-SDR dongles handle the rest, one decoding ADS-B with readsb, one capturing VHF airband transmission by transmission. Everything gets transcribed locally with Whisper, an AI extraction pass works out what happened and where, and about 30 seconds after a call ends it's a color-coded pin on the map with the audio one click away. Location matching is honest on purpose: an exact intersection match gets a solid pin, an area-only match gets a dotted one, and it tells you which.
Here's the design idea underneath it, and what I think separates it from the other transcribe-and-map projects out there: this is built for tactical situational awareness when the grid's down. The system does its learning while it's online, building its own gazetteer of local streets and places, learning unit callsigns and talkgroup names, priming the transcriber's vocabulary from real local traffic, precisely so it's more capable when it's cut off. Map tiles, geocoding, and hazard data are all cached locally with that scenario in mind.
The picture in my head has always been: grid's down, the box is running on backup power serving wifi, and my neighbors connect with their phones and everyone can see what's happening around us, instead of one guy hunched over a scanner relaying it. It's not shelf gear you dust off when something happens; the whole point is that running it every day is what trains it for the day you need it. Transcription is already fully local, the LLM extraction step currently uses a hosted model when online (it runs me about a dollar a day at 24/7), and the next build phase is a GPU box that closes that last gap with a local model.
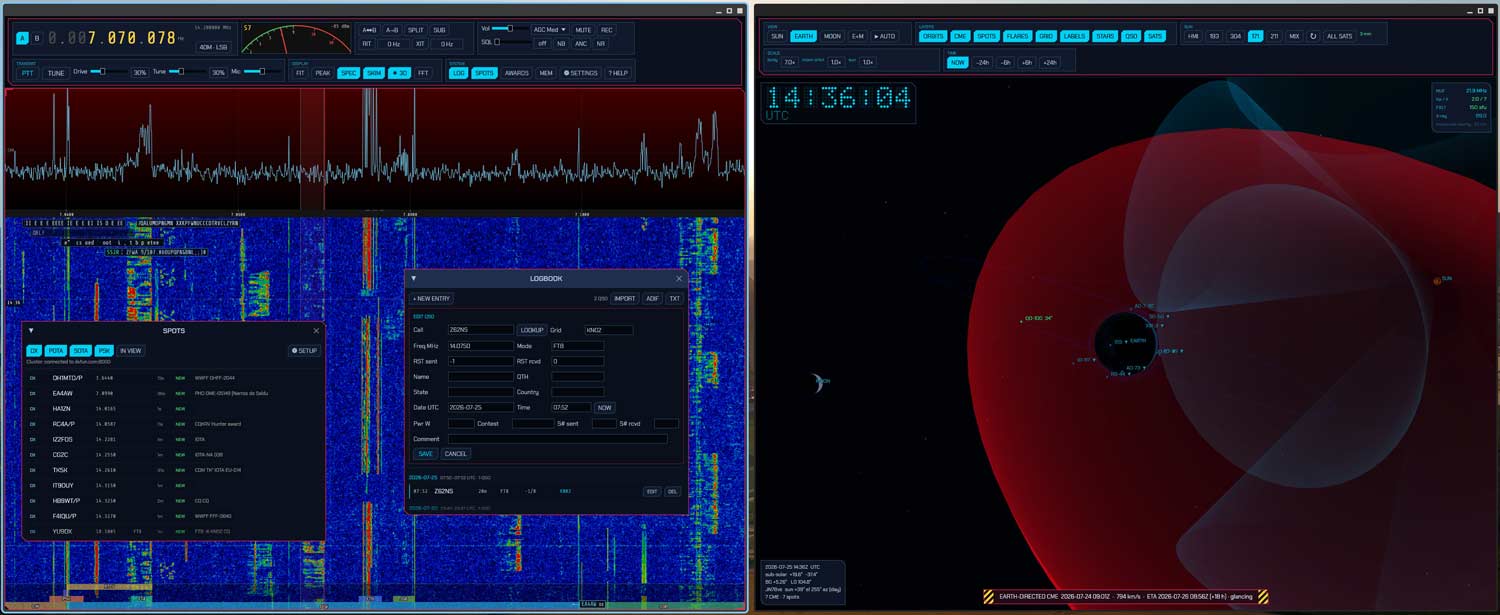
The feature people are having the most fun with is the airband/ADS-B correlation. The system pulls spoken callsigns out of airband transcripts and matches them to ADS-B tracks by time and geometry, with match windows scaled by altitude and speed, plus hex-to-tail-number derivation. Click a plane on the map and hear what its pilot actually said, with a confidence badge when the match came from a partial readback. Beyond that: an ATAK feed (CoT/KML/GeoJSON), twice-daily AI briefs, a BOLO board, incident threading with a unit activity board, and helicopter orbit detection.
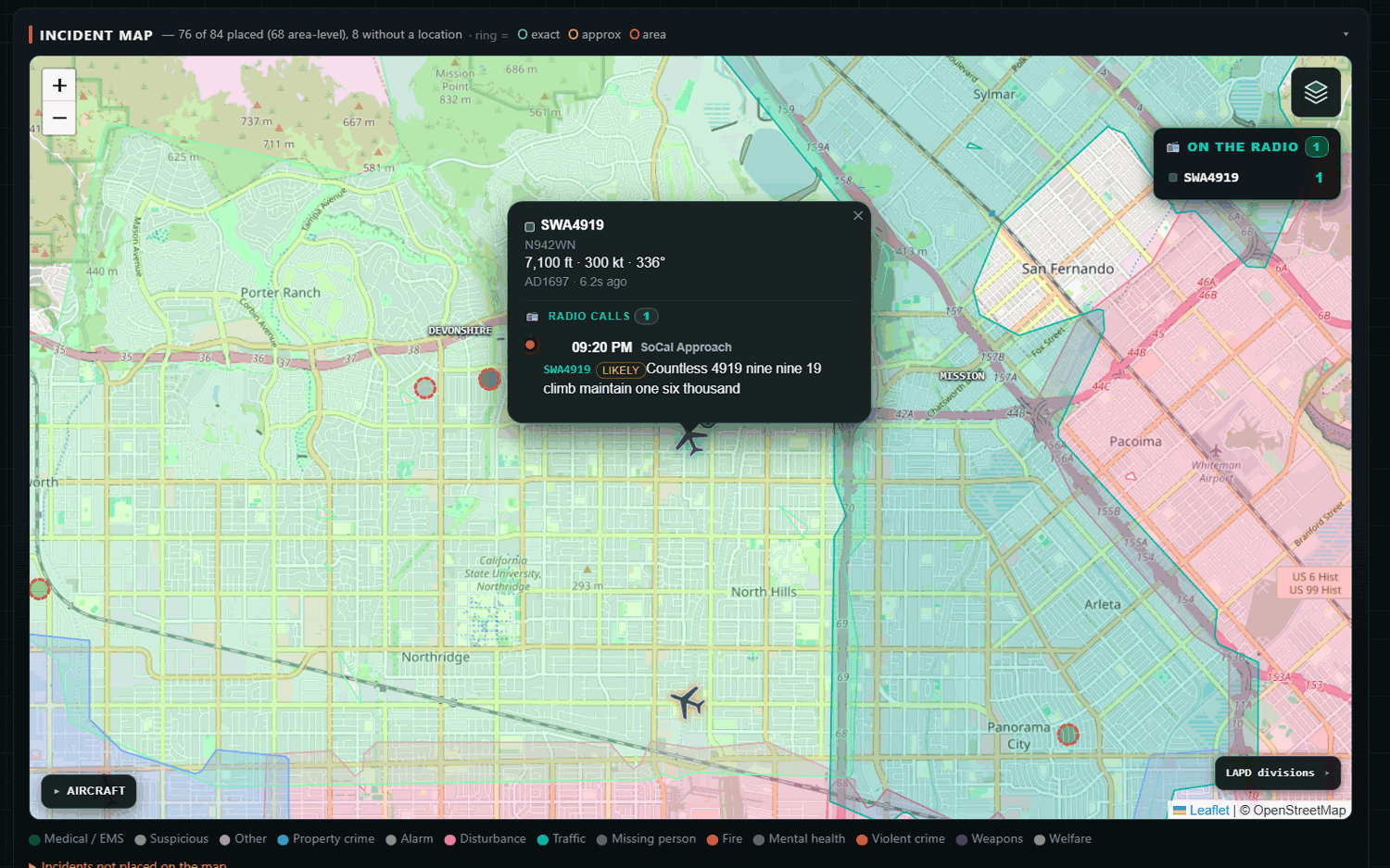
Benjamin adds that a public demo is available at https://demo.scannercommand.com. But he notes that "the public demo is a replay of two real days of traffic from my setup".
The software has not yet been released, and it does not appear to be free or open-source. There is a signup waitlist available on the scannercommand.com website.
This is an exciting time with AI not only helping to rapidly develop new software, but now being used to summarize and condense the vast amount of information about the state of the surrounding world available in the RF spectrum.