Back in October we first posted about the release of DF-Aggregator, a program by Corey (ckoval7) which can be used to receive and plot data from multiple KerberosSDR direction finding units.
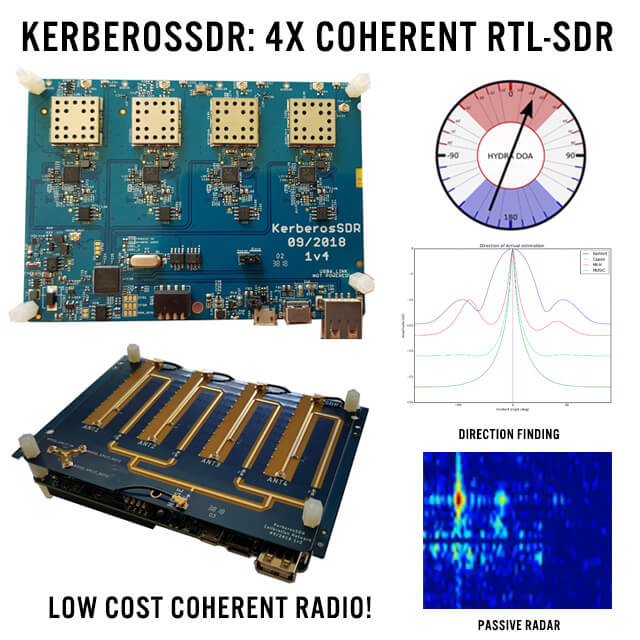
If you weren't already aware KerberosSDR is our 4-channel phase coherent capable RTL-SDR unit that we previously crowdfunded back in 2018. With a 4-channel phase coherent RTL-SDR interesting applications like radio direction finding (RDF), passive radar and beam forming become possible. It can also be used as four separate RTL-SDRs for multichannel monitoring.
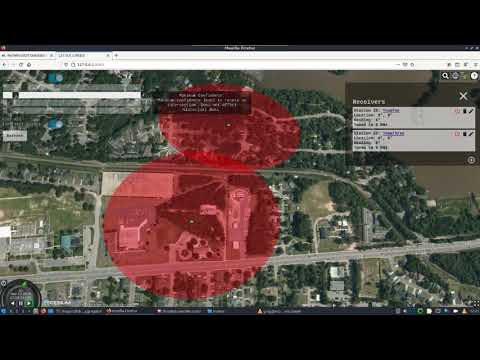
In one of his latest DragonOS videos, Aaron has been testing out DF-Aggregator. In his test he had two vehicles driving around each with a KerberosSDR and antenna array, with both using a mobile data connection to send data to a remote PC running DF-Aggregator. The results were successful, with the team being able to determine the location of a broadcast FM transmitter to within a few meters after a short drive.
DragonOS Focal KerberosSDR x2 Mobile w/ DF-Aggregator Direction Finding Attempt 2 (Better Results)
If you weren't aware KerberosSDR is our 4-channel phase coherent capable RTL-SDR unit that we previously crowdfunded back in 2018. With a 4-channel phase coherent RTL-SDR interesting applications like radio direction finding (RDF), passive radar and beam forming become possible. It can also be used as 4 separate RTL-SDRs for multichannel monitoring.
In previous posts we've shown some interesting experiments performed with the KerberosSDR. For example:
We note that V2 of our KerberosSDR demo software is also on the way but a little delayed. We are aiming to release a beta around the end of the year, or early next year at the latest. The new software will have better handling of bursty intermittent signals, and paves the way for new developments coming in 2021 such as combined passive radar direction finding.
The KerberosSDR: 4x Tuner Coherent Capable RTL-SDRKerberosSDR Android App for Direction FindingAn Example of KerberosSDR Passive Radar Display Peak Hold Displaying Aircraft and Road Tracks
The GRAVES radar at 143.05 MHz is often used by amateur radio astronomers as a way to detect the echos of meteors entering the atmosphere. The basic idea is that meteors leave behind a trail of ionized air which is reflective to RF energy. This RF reflective air can reflect the signal from the powerful GRAVES space radar in France, allowing the radar signal to be briefly received from far away. Detecting the angle of arrival from these reflections could help determine where the meteor entered the atmosphere.
Their experiments used a pair of J-Pole antennas and a LimeSDR receiver. The LimeSDR has two channels and can receive the signal coherently from both channels. The phase difference in the received signals from the two antennas can then be measured, and the angle of arrival calculated.
In their testing the first tested with 145 MHz amateur radio satellites. Unfortunately due to the low elevation of the antennas and multipath from terrain obstructions an angle could not be calculated. In a second experiment they tried receiving terrestrial APRS signals. With APRS they were successful and were able to determine the angle of arrival from multiple stations. Unfortunately for GRAVES meteor echoes they were not entirely successful, citing multipath issues due to houses, and the need for a clear view of the horizon.
Over on our YouTube channel we've uploaded a short video that gives a tutorial and demo of the KerberosSDR being used as an RF direction finding system in a car. If you weren't aware, KerberosSDR is our recently released 4x Coherent RTL-SDR which can be used for tasks such as direction finding and passive radar. KerberosSDR was successfully crowdfunded over on Indiegogo, and we have recently completed shipments to all backers. Currently we are taking discounted pre-orders for a second production batch on Indiegogo.
In the video we use a Raspberry Pi 3 B+ running the KerberosSDR image as the computing hardware. The Pi 3 is connected to a high capacity battery pack. It is important to use a high quality battery pack that can output 3A continuously as this is required for the Raspberry Pi 3 B+ to run without throttling. The battery pack we used has multiple outputs so we also power the KerberosSDR with it.
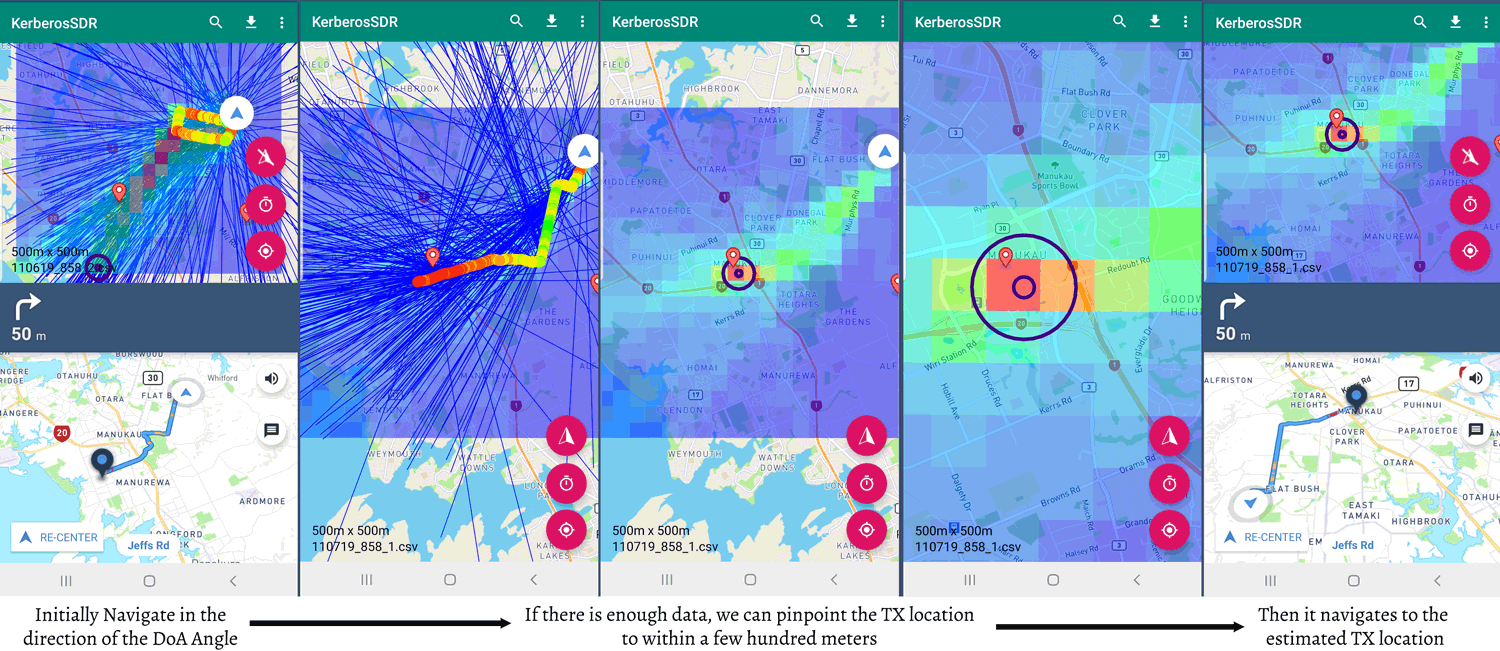
Once powered up we connect to the KerberosPi WiFi hotspot, and then browse to the web interface page. We then tune the KerberosSDR to a TETRA signal at 858 MHz, perform sample and phase calibration, set the decimation and FIR filtering, and then enable the direction finding algorithm. At this point we enter the Android app and begin direction finding and logging our data.
After driving for a few minutes we stop and check the logfile and find that the majority of the bearing lines point in one direction. With this info, a drive in the direction of the bearing points to gather more data is performed. Once additional data was gathered we open the log file up again, and see where all the bearing lines cross. Where they cross indicates the location of the 858 MHz transmitter. The heatmap data also gives us a second confirmation that the transmitter is located where we think.
NOTE: Some of the features shown in the video like the heatmap, confidence settings and plot length settings are not yet released in the current version of the app. They will be released next week.
Full instruction on using the KerberosSDR are available at rtl-sdr.com/ksdr.
KerberosSDR Direction Finding With Android App Demo and Tutorial
If you weren't aware, KerberosSDR is our recently released 4x Coherent RTL-SDR which can be used for tasks such as direction finding and passive radar. KerberosSDR was successfully crowdfunded over on Indiegogo, and we have recently completed shipments to all backers. Currently there is only about 20 units of the batch one production left in stock.
We are currently offering discounted preorders for batch two units on Indiegogo which we expect will be ready to ship in July or hopefully earlier. If you are interested, please order soon to avoid missing out as the price will be raised again once we are shipping. Batch two will be the same as batch one except for some minor changes. For example we have decided to convert the microUSB port into a USB-C port as we have found that there are many very poor quality microUSB cables on the market which could cause issues for users. USB-C cables are generally of a higher quality.
More information about KerberosSDR is available on the Indiegogo page.
KerberosSDR Updates
Since our last post on this blog about KerberosSDR we have made some enhancements to the software.
The KerberosSDR code is now fast enough to run at 1-2 Hz update rates for direction finding and passive radar on a Raspberry Pi 3 B+.
There is now a web interface, so the KerberosSDR can be controlled via a WiFi hotspot and internet browser. Useful for use on the Pi 3 and Tinkerboard.
For future updates we are currently working on several new features:
Filters to remove low confidence DoA results on the Android app.
A secondary heatmap type display on the Android app based on signal strength, for two direction finding indications.
Methods to determine the center of multiple bearing intersection points.
Further enhancements to processing speed, possible improved results from processing gain and possible better accuracy from improved DoA algorithms.
Within the next few weeks we will also release full tutorial videos that will show how to set up and use the KerberosSDR for direction finding and passive radar with a Raspberry Pi 3 or Tinkerboard. If you prefer a text based explanation we already have a guide up at rtl-sdr.com/ksdr.
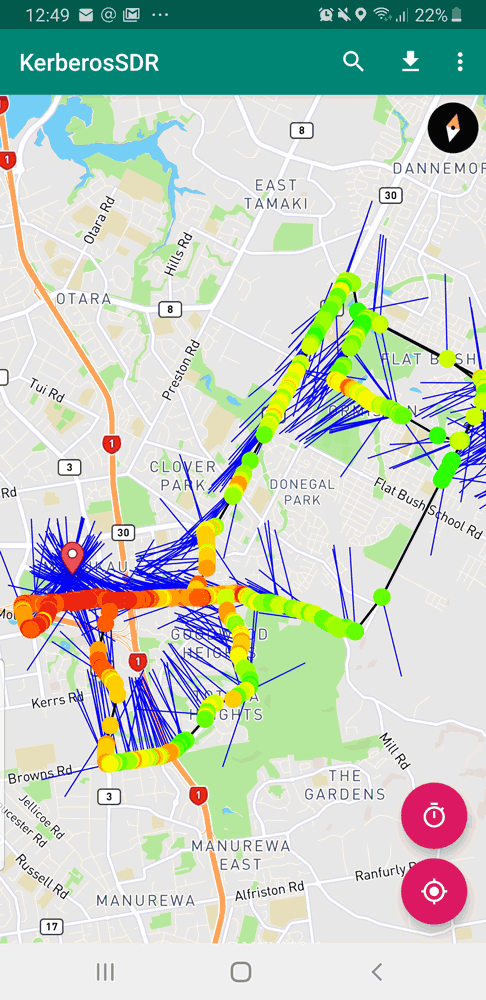
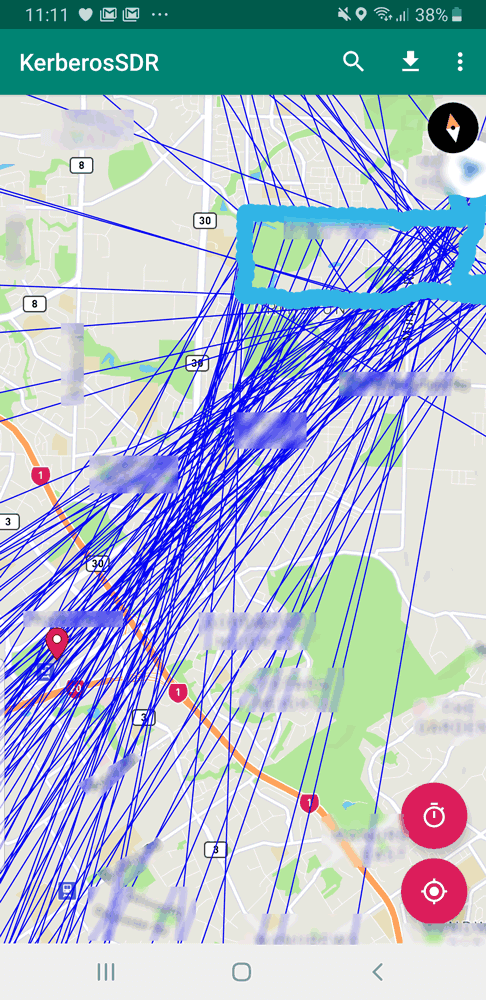
Below is an image that demonstrates the KerberosSDR direction finding Android app. A user of KerberosSDR has also submitted two of his own screenshots that show that he was able to determine the location of a GSM transmitter with a linear antenna array.
KerberosSDR Direction Finding Results. Multiple data points collected during a drive, with bearings pointing towards the TX tower (red marker). Circular array of whip antennas used at freq. 858 MHz.
Just a reminder that one week remains in the KerberosSDR Indiegogo campaign. This is your last chance to grab a KerberosSDR at a discounted preorder price. And at the time of posting there are still 50 "second early bird" units remaining at a discounted price of only $115 USD.
If you weren't already aware, over the past few months we've been working with the engineering team at Othernet.is to create a 4x Coherent RTL-SDR that we're calling KerberosSDR. A coherent RTL-SDR allows you to perform interesting experiments such as RF direction finding, passive radar and beam forming. In conjunction with developer Tamas Peto, we have also had developed open source demo software for the board, which allows you to test direction finding and passive radar. The open source software also provides a good DSP base for extension.
Due to the higher than anticipated number of preorders, we have been able to immediately fund further work on improving the demo software, and will be able to continue to work on improving it throughout this and next year. First on the agenda is improving the code buffering structure and DSP processing speed. Shortly after we'll be looking at adding additional features to aide with calibration and direction finding.
We have also now begun ordering parts, begun prototyping the metal enclosure, and have finalized the PCB. Manufacturing is on track to begin shortly after the campaign ends.
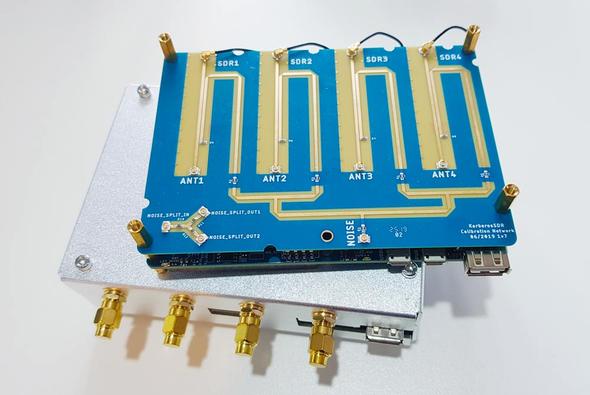
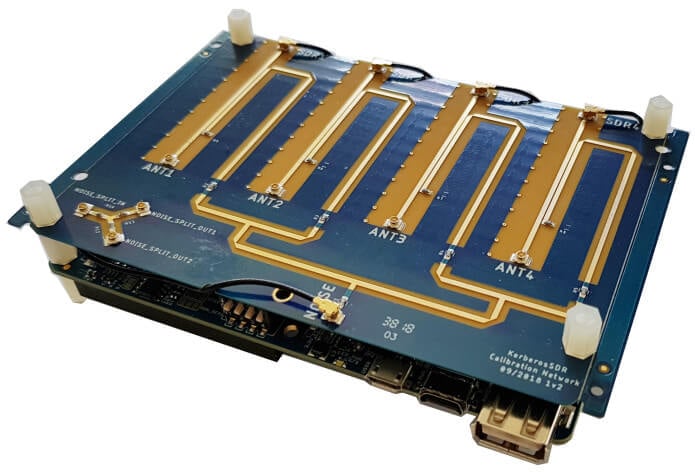
KerberosSDR Prototype with Calibration Board Attached (Metal Enclosure with SMA connectors Not Shown)
KerberosSDR is our upcoming low cost 4-tuner coherent RTL-SDR. With four antenna inputs it can be used as a standard array of four individual RTL-SDRs, or in coherent applications such as direction finding, passive radar and beam forming. More information can be found on the KerberosSDR main post. Please remember to sign up to our KerberosSDR mailing list on the main post or at the end of this post, as subscribers will receive a discount coupon valid for the first 100 pre-order sales. The list also helps us determine interest levels and how many units to produce.
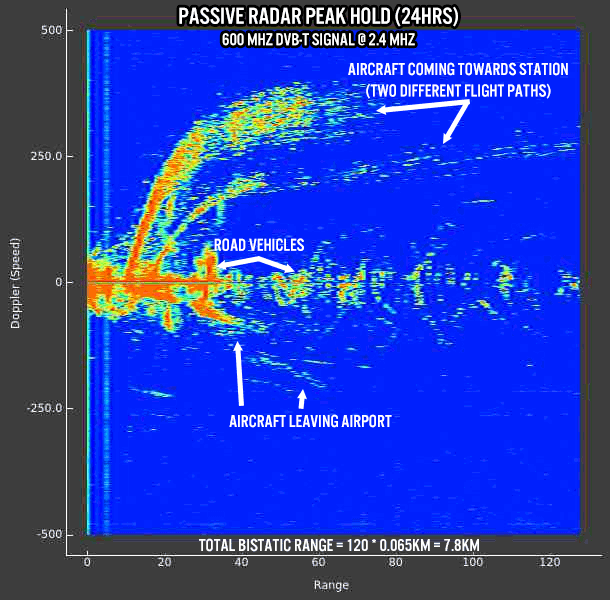
In this post we'll show KereberosSDR being used as a passive traffic radar. Passive radar works by using an already existing transmitter such as a FM, DAB, TV or GSM and listening to the reflections of those signals created by moving objects like aircraft, boats and cars. A simple passive radar consists of two directional antennas. One antenna points at the 'reference' transmitter (the transmitting tower), and the other towards the 'surveillance' area that you want to monitor. The result is a speed vs distance plot that shows all the moving objects.
For this test we parked our car to the side of a highway and pointed a cheap DVB-T Yagi antenna towards a DVB-T transmission tower, and another cheap Yagi down the road. The video shown below displays the results captured over a 5 minute period. The blips on the top half of the display indicate vehicles closing on our location (positive doppler shift), and the blips on the bottom half indicate objects moving away (negative doppler shift).
DVB-T Antennas In Car
The resolution of each individual vehicle is not great, but it is sufficient to see the overall speed of the highway and could be used to determine if a road is experiencing traffic slowdowns or not. When larger vehicles pass by it is also obvious on the display by the brighter blip that they show. The display also shows us that the highway direction coming towards us is much busier than the direction moving away.
In the future we'll be working on optimizing the code so that the display updates much faster and smoother. It may also be possible in the future to use the third and fourth tuners to obtain even greater object resolution.