WHY2025 Conference: Passive and Active RADAR using Software Defined Radio
Videos from the WHY2025 (What Hackers Yearn) have recently been uploaded to YouTube, and there is one interesting talk by Jean-Michel Friedt titled "Passive and active RADAR using Software Defined Radio".
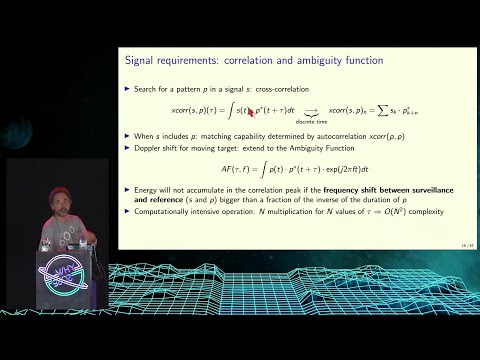
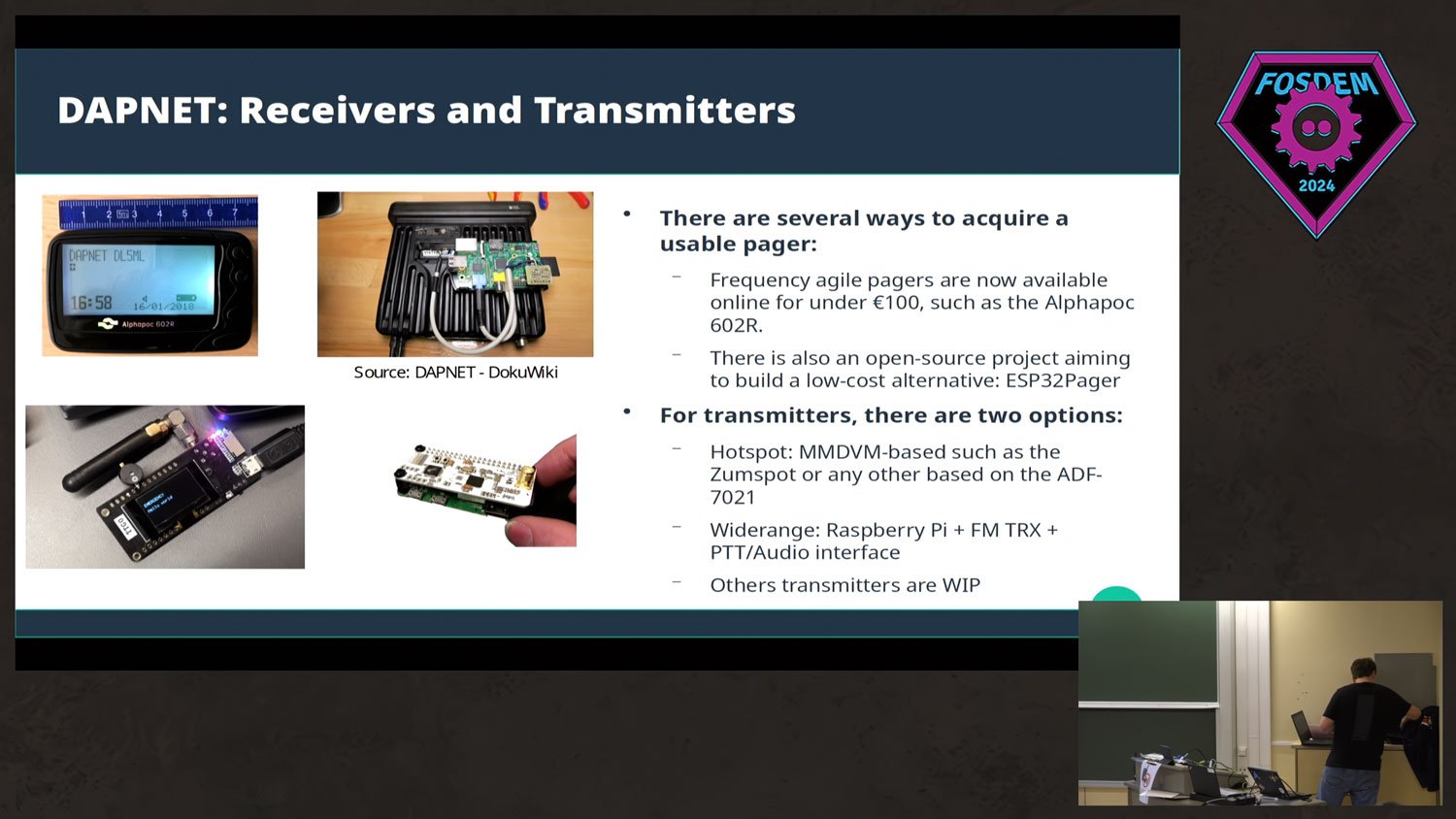
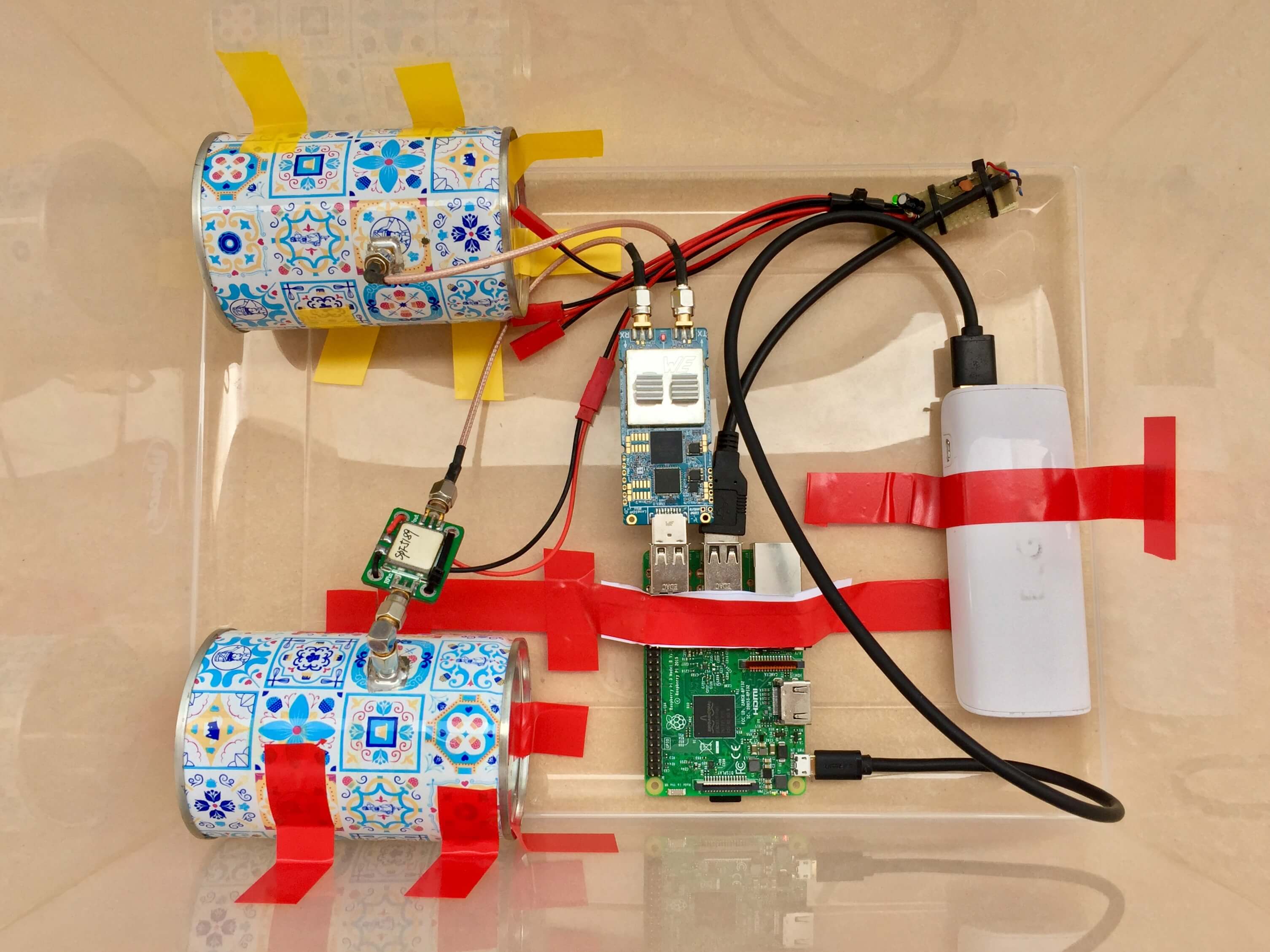
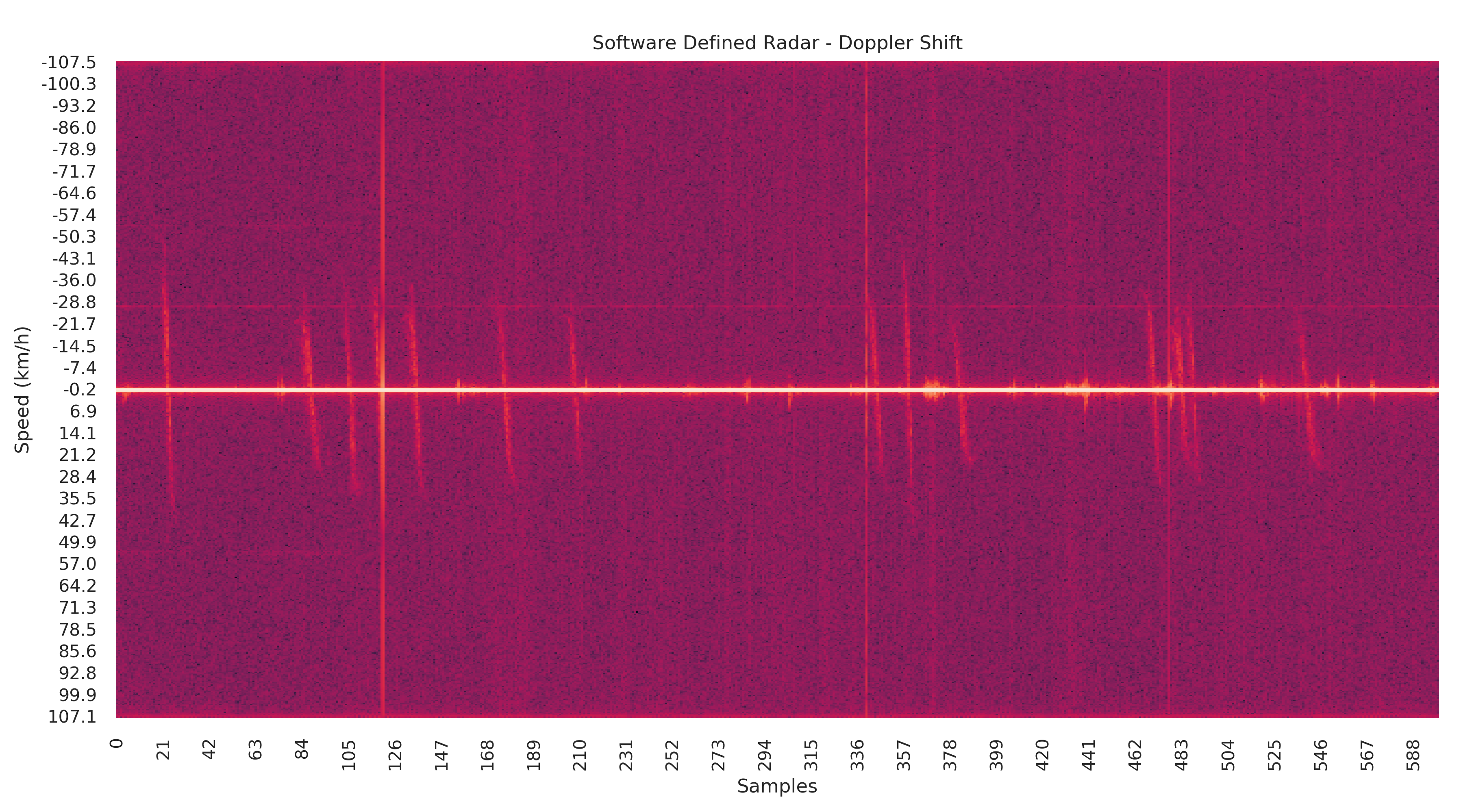
RAdio-frequency Detection And Ranging (RADAR) aims at using electromagnetic signals for detecting target location and motion. We demonstrate in this talk various RADAR architectures using dual-channel coherent Software Defined Radio (SDR) receivers and the associated signal processing techniques relying heavily on cross-correlations. Embedded systems are tackled, with a Raspberry Pi providing enough computational power for recording and post-processing.
RAdio-frequency Detection And Ranging (RADAR) aims at using electromagnetic signals for detecting target location and motion. Being constantly illuminated with electromagnetic smog, we can benefit from existing radiofrequency emitters meeting RADAR requirements -- strong power and wide bandwidth -- for passive RADAR measurements where no active emitter is needed, using only coherent passive dual-channel Software Defined Radio (SDR) receivers for passive recording of existing signals. If existing signals are unsuitable, we can use the same principle with non-cooperative emitters such as a Wi-Fi dongle in an active RADAR setup.
All processing flowcharts are implemented using GNU Radio for real time acquisition, and GNU/Octave or Python for post-processing: generic principles will be demonstrated, applicable to all sorts of receiver hardware. We will conclude with Synthetic Aperture RADAR (SAR) where antenna motion is used to simulate wide aperture receiving antennas, adding azimuth resolution to range resolution.
Supporting documents are found a https://github.com/jmfriedt/SDR-GB-SAR or https://github.com/jmfriedt/passive_radar orhttps://github.com/jmfriedt/sentinel1_pbr