Automatically Photographing Passing Aircraft with an RTL-SDR, Pi 3, and IoT Software
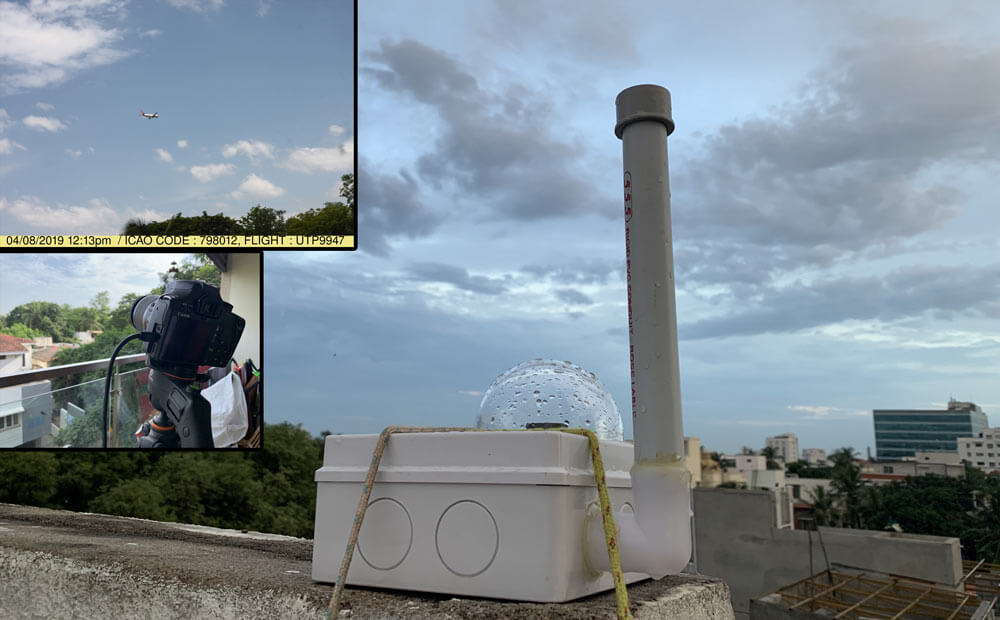
Arun Venkataswamy has recently completed a write up about his system which automatically captures images of passing aircraft. It works by using a Raspberry Pi and RTL-SDR to listen to ADS-B broadcasts from aircraft. These broadcasts contain the live current location and altitude of all aircraft in his area. When a landing aircraft is detected to be passing near his house, the Raspberry Pi sends a signal to another Raspberry Pi connected to a camera on his balcony, and that snaps a photo of the passing aircraft.
In terms of software, Arun uses dump1090 as the ADS-B decoder. For communications between the two Raspberry Pi's he uses Node-RED and Mosquitto in order to communicate with MQTT. On the second Raspberry Pi, gPhoto2 captures images from the camera, and then ImageMagick is used to write some text about the aircraft and photo on the image. Arun's post goes in further detail about the code and conditions he uses to determine when a photo should be snapped.
In the past we've posted about a similar project where an RTL-SDR and Raspberry Pi based ADS-B tracker was used with a servo mounted video camera to track and record video of passing aircraft.




























congratulations, but do you think it’s possible to make a system with a small rotor? The idea is to move the camera in vertical and horizontal axis. Obviously, the camera should move automatically considering the adsb data and its own gps position.
Of course it is possible. PTZ camera for example. You would need a bit of calibration, but it is possible. The data that the system send is the X Y gps coordonate, but also the altitude. By knowing where you are, you can hardcode your location or add a small gps module (cheap on the chinese marketplaces), hard code the compass or get a compass module (again chinese market). Now you can calculate the angles and distance from you to the aircraft.
Ex, the data comming out could be: compass 250°, elevation 30°, distance 13531ft. Now you just need to turn the camera so it point to 250° and lift it to 30°. Since it is 13531ft away, if it have zoom capability, probably go to max zoom.
An amelioration would be to calculate the zoom factor based on the distance and imprecision of the system, as to get as close as possible without missing it. After all, even if the information is basically real time, there is still some lag. You can compensate for it too, in part with trial and error (aka: change the delay compensation until it work) or do some researches and testing to figure it out. Trial and error is probably easier, go with like 0.5secs and start from there.)
Now add passive radar and take a picture of airborne objects that are not transmitting an ADSB signal, too 😉
(Use some image recognition to tag birds of different types, and tag the other ones as interesting haha)
The problem with most of the current home passive radar is that they only use two receive channels (LimeSDR,SDRplay duo) and any hardware that could provide more than two phase coherent receive channels (hackrf one,LimeSDR,airspy R2) gets expensive fast.
I suppose what I’m trying to say is that with only 2 variables, (one antenna pointing at the signal source and one pointing away from it), you can not calculate a three dimensional location in space. It is a two dimensional Radar, you know the rough distance (Slant Range – http://www.radartutorial.eu/01.basics/Slant%20Range.en.html) and approximate speed (doppler shift), but not the height or the angle (if you had either you could approximate the Down Range).
But with one or more KerberosSDR devices then the possibility of tracking aircraft in three dimension space using passive radar at a low price may become possible. But with only 8-bits of dynamic range there is at least one cool trick that might not be possible. The reflected RF will be re-modulated by the vibrations on the surfaces of the aircraft, so at least in theory it should be possible to hear and distinguish, after processing, the downconverted audio returned by a helicopter, a propeller aircraft and a jet engine aircraft.