Quick Demo of our KrakenSDR Network Mapping Direction Finding Software (Alpha)
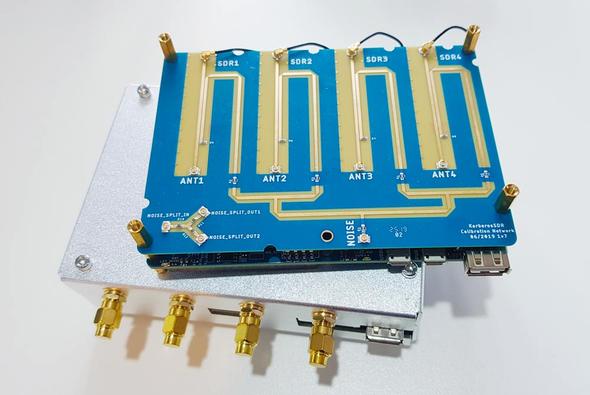
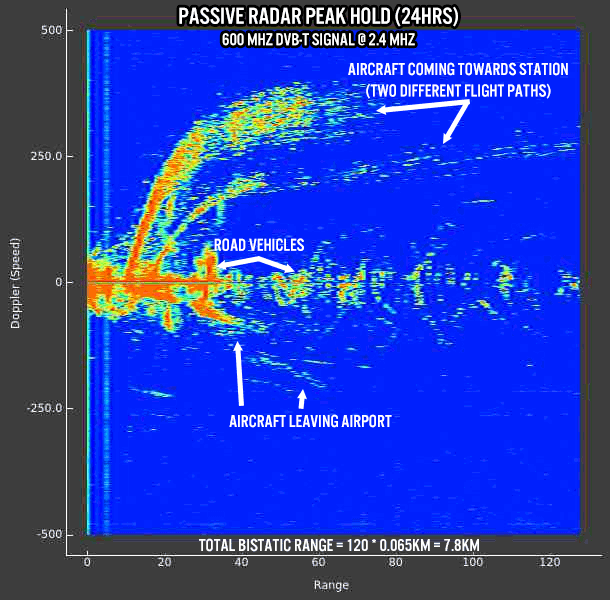
The KrakenSDR is our 5-channel coherent radio based on RTL-SDRs, and it can be used for applications like radio direction finding and passive radar. We successfully crowd funded the device on Crowd Supply back in November 2021.
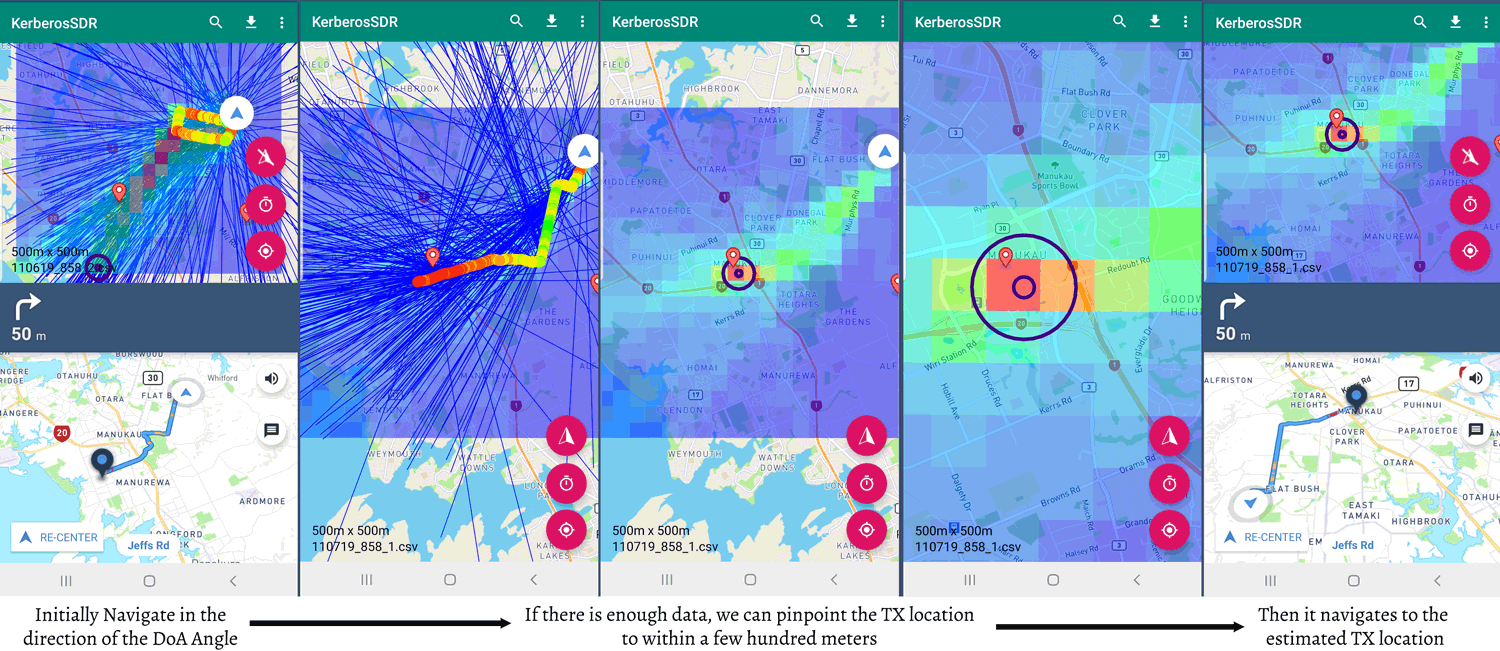
Over the past year we've been working on a networked mapping system for KrakenSDRs that will allow distributed units to contribute radio direction finding bearing data to a central server. This allows for multiple fixed KrakenSDR sites to combine live bearings, allowing for near instantaneous localization of transmission sources.
We are close to releasing an alpha version of this software for KrakenSDR and KerberosSDR customers to test, and will have news about signups within the next few weeks. For now it will be restricted to three networked units per user.
In the future we plan to add (reasonably priced) advanced features like support for more units, history rewind, multi-channel layering, remote KrakenSDR management, object tracking, ID differentiation, and recording and playback of mp3 sound bites based on tracked location.
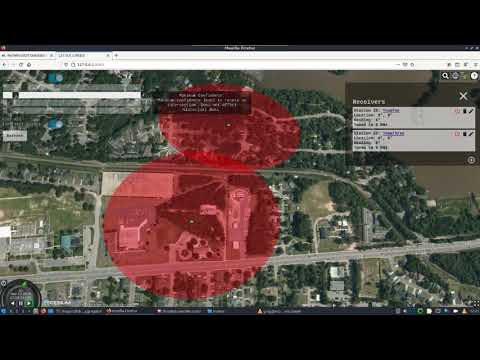
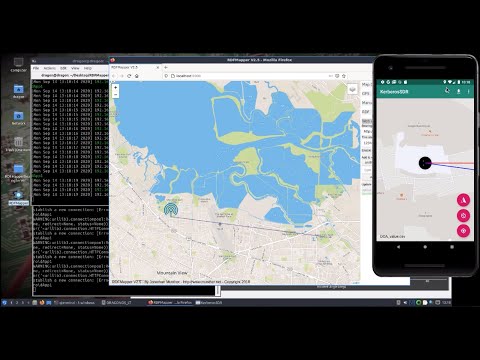
Below is a simple timelapse demo of the system tracking a weather balloon from a single station. Because it's only a single station, the red estimation dot can be ignored. The yellow dot indicates the actual GPS location of the weather balloon. Once the weather improves we'll be setting up a distributed two-station test.
One interesting thing to note is how the KrakenSDR tracks the balloon accurately, until the elevation angle between the antenna and balloon goes above 45 degrees which happens when the balloon rises higher and comes too close to the station. At this angle the antenna array can no longer track the balloon correctly. Once the balloon falls to a lower altitude and the elevation from the antenna is less than 45 degrees accurate tracking resumes.