KrakenSDR Field Reports and Software Updates
We've recently published an update about KrakenSDR field reports and software updates to our KrakenSDR CrowdSupply page. We are cross posting here as well. This update provides some demonstrations of the KrakenSDR that users have uploaded, and provides some updates on some new software that we have been working on.
Also as we'll note shortly in a separate post, we wanted to highlight that our website for direct sales of KrakenSDR and antenna sets is now live at our KrakenSDR shop. Please note that we only have a limited number of KrakenSDRs that we can sell directly, and once they run out, all other sales must go through CrowdSupply.
Field Reports
User YouTube Demonstrations
Frugal Radio
In this video Frugal Radio unboxes and tests his KrakenSDR and Krakentenna's on a vehicle. He is able to come to the location of two unknown transmitters within minutes.
https://www.youtube.com/watch?v=yCU0prz5As4

F4IPO Demo
In this video F4IPO demonstrates his ability to use a KrakenSDR and Krakentennas to locate a TETRA transmitter within 5 minutes.

DragonOS Kraken Pro Cloud Mapper Demo
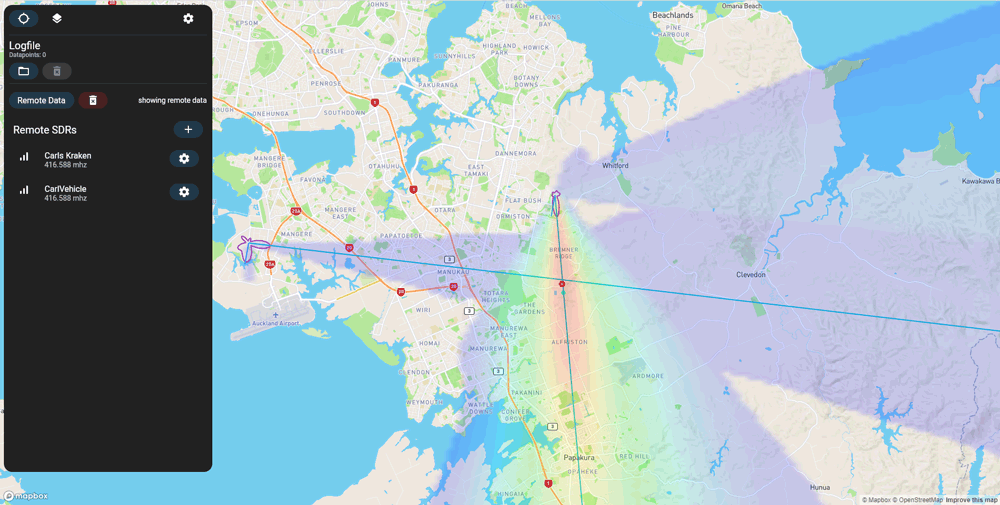
In this video Aaron, creator of DragonOS demonstrates two networked KrakenSDR devices being used with DF-Aggregator and an alpha version of our Kraken Pro Cloud Mapping software (introduced further below). One KrakenSDR is fixed, and another is on a moving boat. He is able to track a beacon on land.

F1MIJ Demo
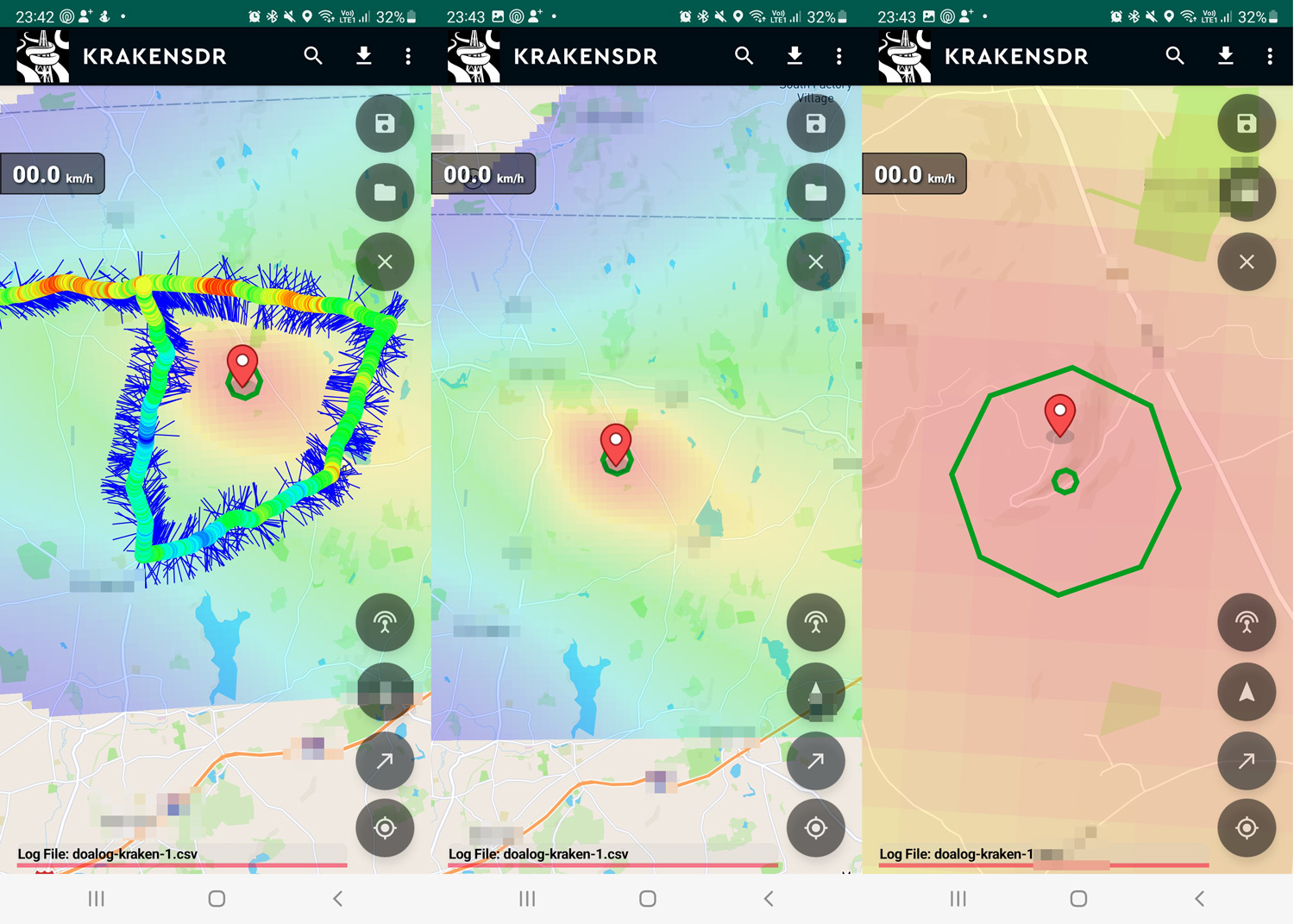
In these videos F1MIJ provides multiple screen recordings of the KrakenSDR Android App in action during a drive.
https://www.youtube.com/watch?v=D7C5_DJkM_k
https://www.youtube.com/watch?v=fiJIhRzG2Os

Manuel Lausmann Unboxing Video
In this video Manuel Lausmann unboxes the KrakenSDR.
Matt Blaze Twitter Thread
In this Twitter thread Matt Blaze @mattblaze describes his experience with the KrakenSDR and shows that he was able to determine the location of a 103.5 MHz transmitter. Matt notes that apart from some hardware limitations, his experience with the KrakenSDR is even better than with his extremely expensive high end R&S DDF007.
For a taste of how the system works in practice, here's a plot of DFing the WTOP (103.5) transmitter. We started at the right side (at the Hughes Tower), and ended up (correctly) at the American University tower. The little whiskers along the plot are individual bearings. pic.twitter.com/calkqJd8qU
— matt blaze (@mattblaze) October 15, 2022
@cemaxecuter Twitter Demos
Aaron (whom we mentioned earlier) has also been heavily posting on Twitter showing how he's been successful at getting his KrakenSDR running on a SteamDeck, a new type of handheld gaming device from Valve.

He also briefly demonstrates the KrakenSDR being used as five independent receivers in SDRAngel.

Website Release
We also wanted to note that we now have our website live at www.krakenrf.com. This is mostly a marketing and general overview website. All the technical documentation and guides will remain on the GitHub Wiki.
KrakenSDR Forum
We have also now released our KrakenSDR forum at https://forum.krakenrf.com. If you have general questions, or support inquires please post there rather than through email so everyone can learn. If there are specific software bugs, please continue to post those as GitHub issues.
Kraken Cloud Pro Alpha Release
We are now releasing an early alpha version of our online 'Kraken Cloud Pro' service. We want to note that this software is still in ALPHA status. That means that all the intended features are not yet implemented, and that it may have multiple bugs. We also do not guarantee any uptime for this service at this time.
Kraken Pro Cloud is our online cloud mapping solution for KrakenSDR devices. It allows you to upload KrakenSDR direction finding data onto our central server, so that you can combine bearing data from multiple geographically distributed KrakenSDR devices. With the right geography of the receivers and transmitter, this allows you to instantly determine the location of a transmitter without needing to take multiple readings with a vehicle.
Documentation on the use of Kraken Pro Cloud is available on our Wiki at this page.

You can also do offline analysis of log files collected from the Android App or recorded via the Web GUI.


Kraken Pro Cloud Timelapse Demo
As part of the testing of the service we recorded a timelapse of a KrakenSDR station tracking a weather balloon.
The above is a video of a simple timelapse demo of the system tracking a weather balloon from a single station. Because it's only a single station, the red estimation dot can be ignored. The yellow dot indicates the actual GPS location of the weather balloon. Once the weather improves we'll be setting up a distributed two-station test.
One interesting thing to note is how the KrakenSDR tracks the balloon accurately, until the elevation angle between the antenna and balloon goes above 45 degrees which happens when the balloon rises higher and comes too close to the station. At this angle the antenna array can no longer track the balloon correctly. Once the balloon falls to a lower altitude and the elevation from the antenna is less than 45 degrees accurate tracking resumes.
In the near future we will be uploading more demonstrations like this with multiple stations set up.