Over on GitHub, Jean-Michel Friedt has uploaded new code, results, and findings from one of his latest experiments with passive radar. A simple passive radar system uses two coherent receive channels and two antennas. One antenna receives a clean reference signal from an illuminator of opportunity, such as an FM or TV transmitter, while the other surveillance antenna receives echoes from the area containing targets. By correlating the surveillance signal with the reference signal over different delays and Doppler shifts, the system produces a range-Doppler map showing potential targets.
The novel thing about Friedt's recent work is that the illuminator is a moving L/S-Band satellite in space. The illuminator used is the polar-orbiting NISAR, a NASA-ISRO satellite designed for synthetic aperture radar (SAR). SAR satellites create detailed images of Earth by sending radar pulses to the ground and combining the returning echoes collected as the satellite moves, effectively simulating a much larger antenna.
Part of the trouble with using NISAR as an illuminator is predicting when it will be illuminating your current location. Friedt's GitHub readme explains how the software does illumination prediction.
NISAR emits chirp signals at 20 MHz bandwidth in the L and S-band, so a wideband SDR is required to get the full resolution. In his setup, Friedt used an Ettus B210 or Enjoy Digital M2SDR SDR, with two active GNSS antennas.
The results show that he was able to successfully receive reflections of the satellite signal from the ground, transform the range-doppler data into map coordinates, and overlay them on a map.
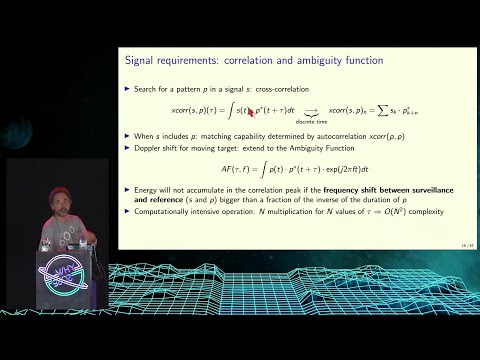
Videos from the WHY2025 (What Hackers Yearn) have recently been uploaded to YouTube, and there is one interesting talk by Jean-Michel Friedt titled "Passive and active RADAR using Software Defined Radio".
RAdio-frequency Detection And Ranging (RADAR) aims at using electromagnetic signals for detecting target location and motion. We demonstrate in this talk various RADAR architectures using dual-channel coherent Software Defined Radio (SDR) receivers and the associated signal processing techniques relying heavily on cross-correlations. Embedded systems are tackled, with a Raspberry Pi providing enough computational power for recording and post-processing.
RAdio-frequency Detection And Ranging (RADAR) aims at using electromagnetic signals for detecting target location and motion. Being constantly illuminated with electromagnetic smog, we can benefit from existing radiofrequency emitters meeting RADAR requirements -- strong power and wide bandwidth -- for passive RADAR measurements where no active emitter is needed, using only coherent passive dual-channel Software Defined Radio (SDR) receivers for passive recording of existing signals. If existing signals are unsuitable, we can use the same principle with non-cooperative emitters such as a Wi-Fi dongle in an active RADAR setup.
All processing flowcharts are implemented using GNU Radio for real time acquisition, and GNU/Octave or Python for post-processing: generic principles will be demonstrated, applicable to all sorts of receiver hardware. We will conclude with Synthetic Aperture RADAR (SAR) where antenna motion is used to simulate wide aperture receiving antennas, adding azimuth resolution to range resolution.
Recently Dr. Sean Peters from the Naval Postgraduate School, in Monterey, CA presented an interesting webinar titled "Leveraging Ambient Radio Noise for Passive Radar Sensing of the Terrestrial and Space Environment".
In passive radar, the radio source is typically an existing powerful terrestrial broadcast station, such as FM, DAB, TV or cellular. However, Dr. Peters makes use of more ambient radio noise sources, such as sun noise, and even noise from Jupiter.
By using Sun noise as the source and an Ettus USRP SDR as the receiver, he's been able to measure the ice sheet thickness at the Store glacier in Greenland. Furthermore he's also been able to utilize sun radio noise and radio noise from Jupiter for passive synthetic aperture radar, with the application being planetary remote sensing.
Traditional active radars transmit a powerful electromagnetic pulse and record the echo’s delay time and power to measure target properties of interest, such as range, velocity, and reflectivity. Such observations are critical for investigating current and evolving conditions in extreme environments (i.e., polar regions and planetary missions); however, existing radar systems are resource-intensive in terms of cost, power, mass, and spectrum usage when continuously monitoring large areas of interest. I address this challenge by presenting a novel implementation of passive radar that leverages ambient radio noise sources (instead of transmitting a powerful radio signal) as a low-resource approach for echo detection, ranging, and imaging. Starting from theory, simulation, and lab-bench testing, I first present the results of our passive radar sounding demonstration using the Sun to measure ice sheet thickness at Store Glacier, Greenland. I then project the passive radar’s performance and ability to provide valuable glaciological observations (such as melt rates, bed reflectivity changes, and englacial water storage) across Greenland and Antarctica.
In the second part of my presentation, I then extend this technique to enable passive synthetic aperture radar (SAR) imaging using radio-astronomical noise sources (e.g., the Sun and Jupiter’s radio emissions). I conclude by highlighting applications of this technique to planetary remote sensing, such as (1) using Jupiter’s HF radio emissions alongside an active VHF radar to characterize and correct for Europa’s ionospheric dispersion during a flyby mission and (2) using the Mars Reconnaissance Orbiter (MRO) Shallow Radar (SHARAD) to analyze solar radio burst candidates for Martian passive sounding.
Leveraging Ambient Radio Noise for Passive Radar Sensing of the Terrestrial and Space Environment
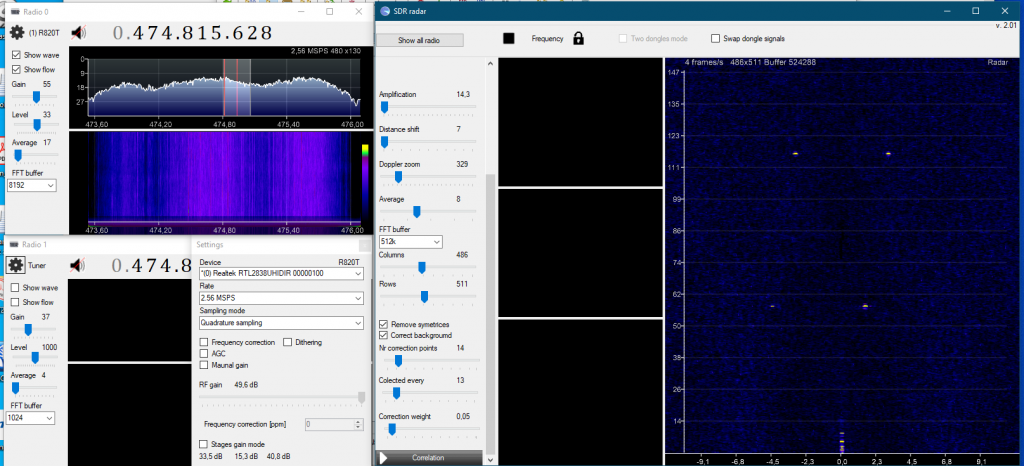
Thank you to Daniel Kaminski for writing in and sharing with us news that he has recently updated his SDRDue Passive Radar software for RTL-SDRs. The major update is that thanks to NVIDIA CUDA GPU processing, the ambiguity function can now be calculated extremely quickly, allowing for very high frame rates. Daniel writes:
Last time I was playing with my Passive Radar. I finally created an ambiguity library which is a really fast 70 frame/s analyzing a continuous string of data 2*1024*1024 bits per frame. This allowed me to record signals from slowly moving cars in real-time. I used a normal TV antenna without any modifications in one dongle mode. To support the library I created a Passive Radar program with all the parameters available for tuning. The code is open and available on GitHub. The movie is available on my website Passive radar | Web page od Daniel M. Kamiński (umcs.pl).
If you weren't aware of it, KrakenSDR is our RTL-SDR spinoff project and is a 5-channel coherent RTL-SDR that we have successfully crowdfunded for over on Crowd Supply. KrakenSDR is the successor to our previous 4-channel coherent product called the KerberosSDR. With a radio like KrakenSDR that is capable of coherence between channels, interesting applications like direction finding and passive radar become possible. You can also use it as five independent RTL-SDRs should you chose to.
We wanted to note that all units preordered through the Crowd Supply crowd funding campaign are now at the Crowd Supply / Mouser warehouse, and the majority have already been shipped out to customers!
The KrakenSDR with 5x Krakentenna's for Radio Direction Finding
Additional units for new purchasers are in a mixture of production and freighting and will be available for fulfillment as soon as we can. We are constrained by supply and production time, so if you're interested in a KrakenSDR, please get your order in so that you have an earlier place in the queue.
KrakenSDR ProductionKrakenSDR Boxes
Other Recent KrakenSDR Updates
Wiki Manual: Our Wiki manual and guide is up at https://github.com/krakenrf/krakensdr_docs/wiki. It covers topics from what you need to get started, radio direction finding theory and background, antenna array setup, KrakenSDR Web-GUI software guide, Android App guide and a Passive Radar guide.
Install Scripts, VirtualBox Images, Docker: For general vehicle based direction finding, which is the most popular application, we recommend using our premade Raspberry Pi 4 image for easy almost plug and play setup. But to ease installation on other computing devices (especially as the Pi 4 stock is non-existent at the moment due to the supply chain crisis) we've now created an automatic Linux install script and a Virtual Box image which can be run on Windows or Linux host machines. Third parties have also released a Docker container. See this page on our Wiki for more information.
Customer Feedback: We've also had some great customer feedback so far with one user submitting examples of his success in locating transmitters like a 162 MHz NOAA weather station, and various fox hunt beacons.
KrakenSDR Direction Finding with Android App
Arrow Antennas: For fixed site direction finding installs, Arrow Antennas is now shipping their 5-element dipole antenna array.
If you're interested in the latest KrakenSDR updates, please follow us on the Crowd Supply mailing list, and keep an eye out for our official krakenrf.com website releasing soon.
With a 5-channel phase coherent RTL-SDR interesting applications like radio direction finding (RDF), passive radar and beam forming become possible. It can also be used as five separate RTL-SDRs for multichannel monitoring.
KrakenSDR Updates
Like many other projects we have been severely delayed by COVID work restrictions and the effects it's having on the supply chain, and I'd like to thank everyone who is keen to get a hold of a KrakenSDR for their patience. But the ball is rolling faster now and we have finally received our latest KrakenSDR prototypes! Testing has been ongoing for the last few days, and apart from a few minor issues everything is working brilliantly. At this stage we are confident in the design and are making plans to begin the crowdfunding campaign soon.
The latest KrakenSDR Prototype PCB running on a Pi 4.
Supply Chain Constraints
The first batch will unfortunately be limited to 1000 units maximum due to supply constraints and we expect this first batch to be ready 2-3 months after the campaign finishes. So if you are after a unit ASAP, please ensure you are on the CrowdSupply mailing list as we fully expect demand for the first batch to outstrip the supply.
But if you are willing to wait, batch 2 will be still be available at the campaign special price. we will have a second batch available for early preorder at a discount (sorry due to higher than expected shipping and skyrocketing component prices we can't discount the second batch at the moment). Please keep in mind that the second batch will be at least 6 months away due to the long supply chain resulting from the pandemic.
Next Steps
The next stages in hardware development will involve finalizing our custom milled aluminum enclosure, testing one last prototype, and beginning mass manufacturing when the crowd funding campaign is over.
Work on the software is ongoing, but the beta version of our new DAQ firmware and direction finding DSP software layer is stable and already available on the krakensdr GitHub at https://github.com/krakenrf. Everything resides in the development branches and there is full documentation on the code structure available in the Documentation folder. This code can also be used on the KerberosSDR by editing the configuration files to specify 4 receivers instead of 5.
By the time the units ship out we will have a ready to use SD card image for the Raspberry Pi 4 and a quickstart guide available.
KrakenSDR DAQ and DOA DSP Web Interface
Android App
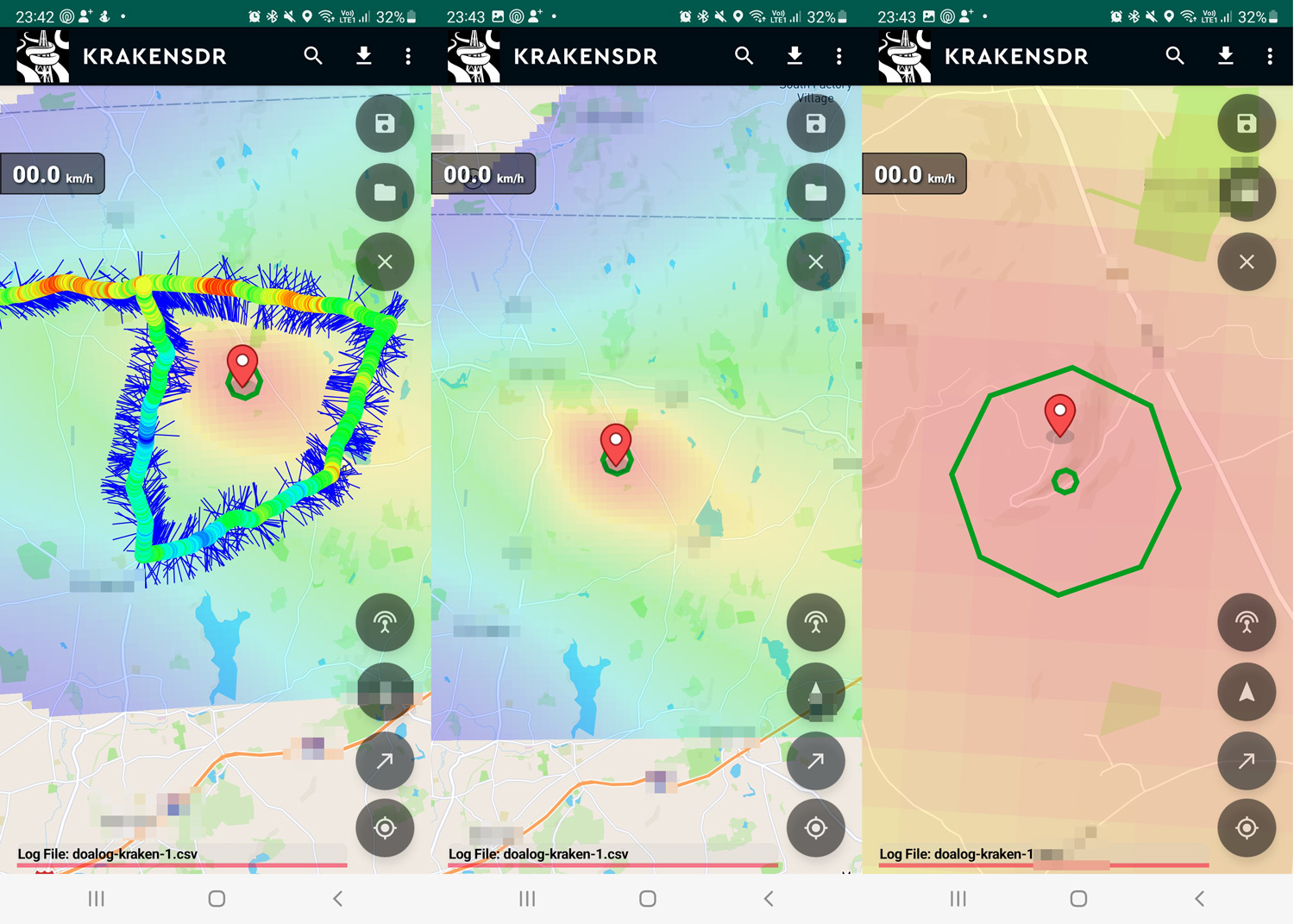
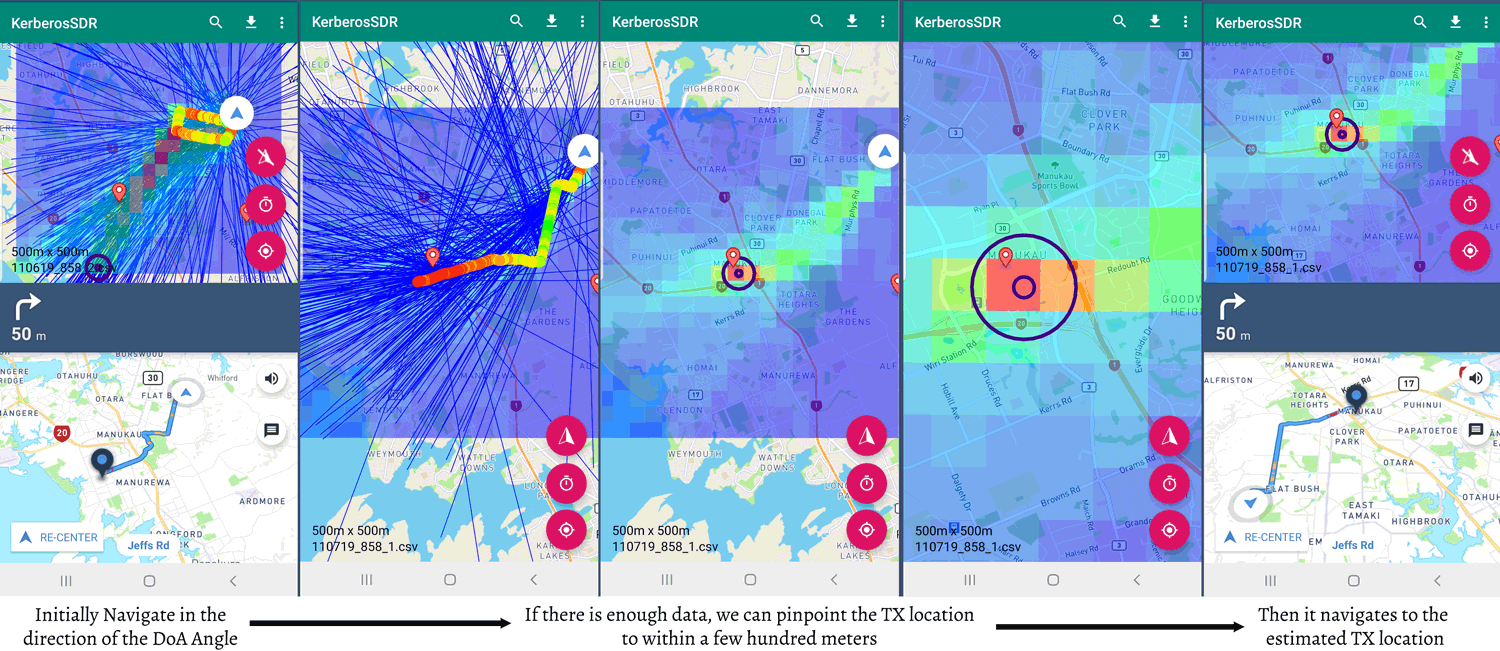
We have also been working at improving the Android direction finding companion app. This app was made during the KerberosSDR release a couple of years ago, and is used to plot and log the direction finding bearings being generated by the Kerberos/KrakenSDR unit, combining it against the GPS and movement data generated by the Android phone. This Android phone + KrakenSDR combination results in a powerful multipath resistant radio direction finding tool, and once enough data has been collected (usually after a few minutes of driving) it is able to determine where the most likely transmitter location is.
The upgraded app makes use of the full 360 degrees of direction of arrival and multipath data that is generated by the KrakenSDR, resulting in a more accurate determination of the transmitter location, and a better understanding of the uncertainties. It also allows users to visualize multipath. There are also various bug fixes and improvements made overall. We are planning to transition this app into a paid app, but all KrakenSDR backers will receive a license for free and the older KerberosSDR app will remain free.
KrakenSDR Android App Improvements
KrakenSDR Antennas
To work as a radio direction finder, KrakenSDR needs five antennas. If you plan to use them in a circular array, they need to be omnidirectional antennas such as whips or dipoles. So to go along with the KrakenSDR we will be selling an optional set of five magnetic whip antennas which can be mounted on for example, the roof of a car. (Please note the magwhips shown in the photo may differ slightly from the final ones sold).
KrakenSDR Magnetic Whips on a Car Roof
We have also been working with Arrow Antennas in the USA, who are producing a KrakenSDR 5-element dipole array antenna which is great for use in fixed sites (for example on the roof of a house). The antenna will be sold by Arrow antennas (not by us), and the future link (not active yet) will be http://www.arrowantennas.com/arrowii/kraken.html. We expect them to generate this page within the next few days. This antenna has been used in all our fixed site experiments as you can see in some of the YouTube videos, and works very well. (The image below show a prototype, we're told the final version may look slightly different.)
Arrow Antenna 5-element antenna array for the KrakenSDR
Future Work
DAQ & Direction of Arrival (DOA / Radio Direction Finding) :
Work on the DAQ and DSP software is coming along well and this is mostly complete and runs stable on a Raspberry Pi 4. There are just now bug fixes and minor features being added. Intermittent 'bursty' signal handing is already working, but we are working on improving it's sensitivity to weak bursty narrowband CW signals which can still be problematic to detect. The Android app is also currently being field tested.
Passive Radar:
Work on new passive radar software is also ongoing and we expect to have something ready for experimentation and with quickstart guides before shipping. At the moment it is also still possible to use the older KerberosSDR software for passive radar, but we believe the new DAQ core software will run things much smoother. The goal for the new software is to not only plot a range-doppler map, but to combine it with direction finding and be able to plot radar detections on a map. This feature may require operation on a device faster than the Raspberry Pi 4, such as GPU based device like a NVIDIA Jetson.
Beam Forming, Interferometry:
One application we think the KrakenSDR would be great with is amateur radio astronomy via interferometry. The ability to combine multiple small hydrogen line dishes spread out over several meters of area should result in much greater radio imaging resolution, without needing to deal with a single huge dish. It may also allow for electrically steering a beam without needing to rotate the dishes.
Advanced Direction Finding + Advanced Log Management:
At the moment networked direction finding (direction finding via multiple fixed or mobile sites spread out around a city or area) is possible via the third party RDF Mapper software, but we aim to create our own advanced platform in the near future. The goal is to have software that will automatically log and alert when a signal of interest appears. For some examples we can see this being used to help coastguard locate distressed marine pleasurecraft that typically do not have AIS via their VHF radios, locate emergency beacons, for animal/wildlife/asset tracking, and monitoring for illegal/interference transmissions.
At this stage the core DAQ+DSP software will also be updated to support monitoring multiple simultaneous channels within the available 2.56 MHz bandwidth, and with a scanning and beacon ID detection feature.
Research into field applications:
One example we hope to test is the operation of KrakenSDR on a drone. With great line of sight from up in the sky, localizing a transmitter should be fast. Another example could be actually visualizing signals like light via augmented reality.
Some of our previous KerberosSDR and KrakenSDR posts might also be of interest.
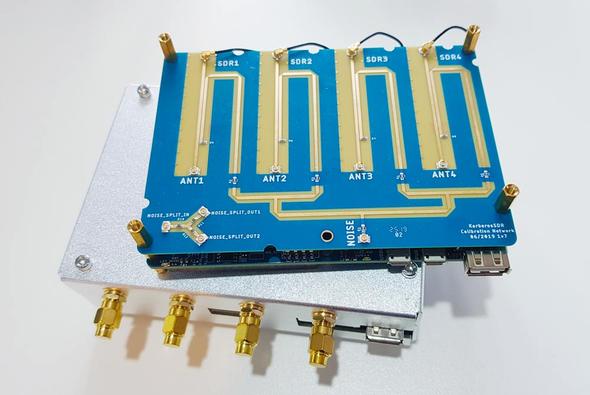
If you weren't aware KerberosSDR is our 4-channel phase coherent capable RTL-SDR unit that we previously crowdfunded back in 2018. With a 4-channel phase coherent RTL-SDR interesting applications like radio direction finding (RDF), passive radar and beam forming become possible. It can also be used as 4 separate RTL-SDRs for multichannel monitoring.
In previous posts we've shown some interesting experiments performed with the KerberosSDR. For example:
We note that V2 of our KerberosSDR demo software is also on the way but a little delayed. We are aiming to release a beta around the end of the year, or early next year at the latest. The new software will have better handling of bursty intermittent signals, and paves the way for new developments coming in 2021 such as combined passive radar direction finding.
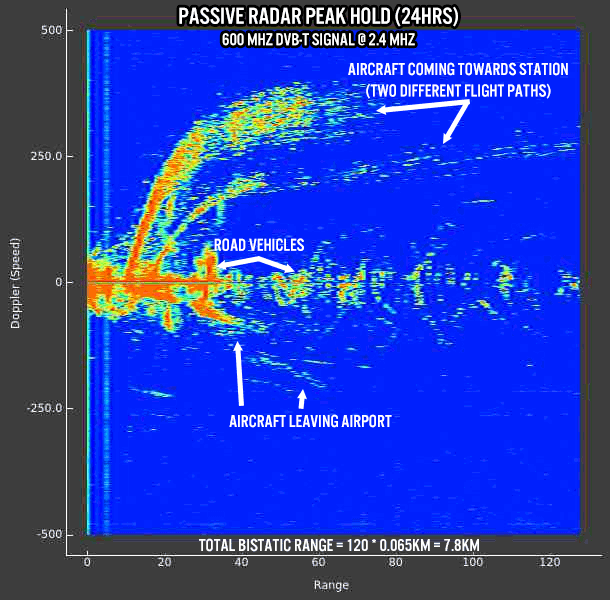
The KerberosSDR: 4x Tuner Coherent Capable RTL-SDRKerberosSDR Android App for Direction FindingAn Example of KerberosSDR Passive Radar Display Peak Hold Displaying Aircraft and Road Tracks
Passive Radar works by using already existing powerful transmitters such as those for TV/FM. A receiver listens for these signals being reflected off of objects like aircraft and vehicles, and compares the reflection with a signal received directly from the transmitter. From this information a doppler (speed) vs range graph of detected objects can be calculated and displayed.
By measuring the path an object travels across the range-doppler display some interesting information about the objects movement can be obtained. However, the display can be noisy, with the reflected object often coming in and out of view on the display. In order to track an object across the range-doppler display in the face of these uncertainties Max uses a Kalman filter to obtain smoothed results. A Kalman filter is an algorithm which combines actual data with predicted data, with the weighting depending on measurement confidence. The result is shown in the video below. A smooth and accurate track of an aircraft can be seen.
Max notes that in the future he'll be working on tracking multiple aircraft detected by the passive radar, and also incorporating direction finding data in his results in order to get cartesian coordinates which could be plotted on a map.
We note that Max's GNU Radio code should be compatible with our KerberosSDR unit, which already has the clock sharing hack built in to the hardware.