DragonOS KerberosSDR Tutorials: Setting up Networked Direction Finding, Monitoring Multiple Signals Simultaneously
DragonOS is a ready to use Linux OS that includes various SDR programs preinstalled. The creator Aaron also runs a YouTube channel that contains multiple tutorial videos for DragonOS. One of the latest videos he's released is a tutorial that shows how to use one of our KerberosSDR (4x Coherent RTL-SDR) units to set up networked direction finding. To do this he uses our core KerberosSDR DSP software, along with RDFMapper, a third party bearing visualization tool with the ability to display bearing from multiple networked direction finding units.
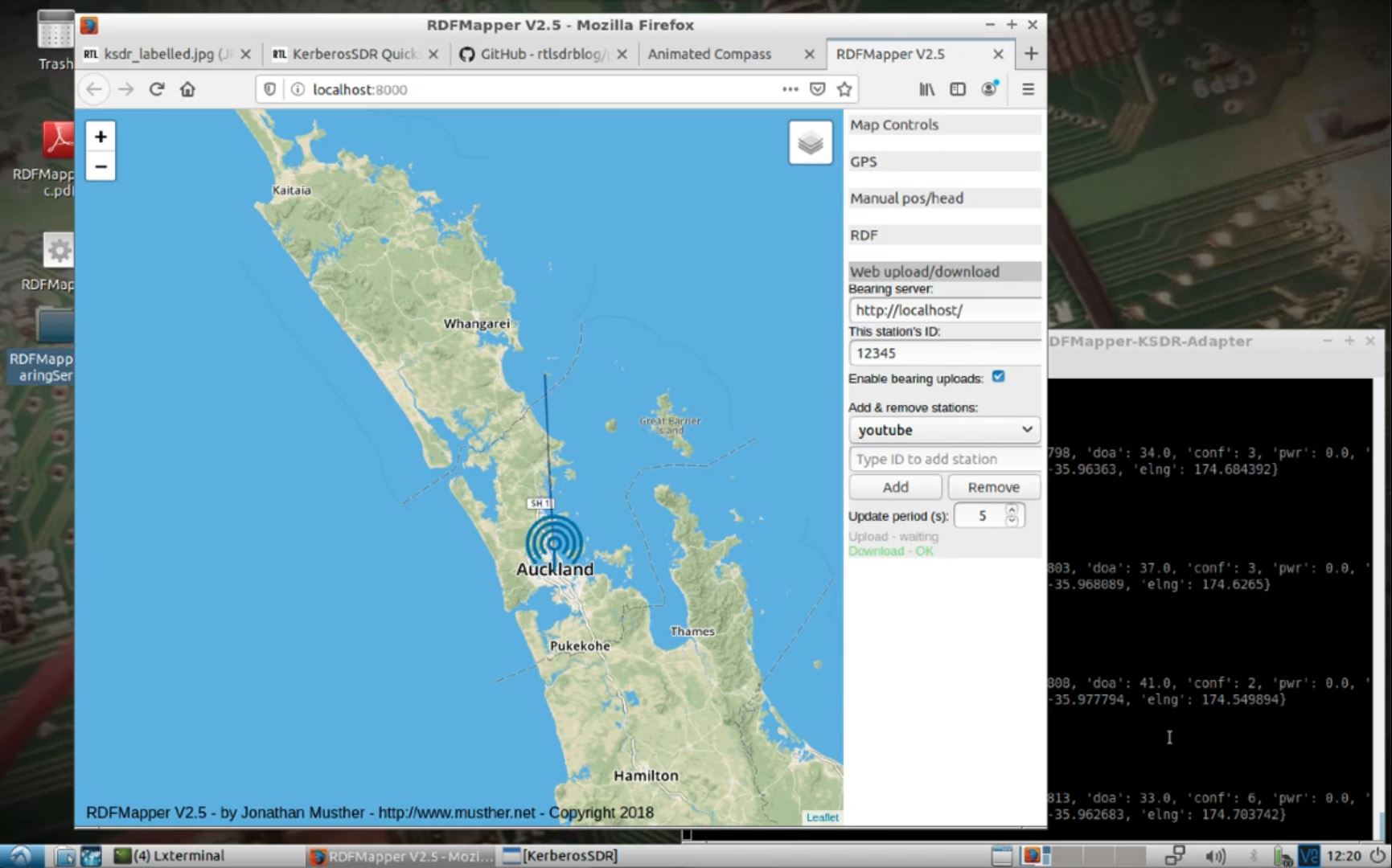
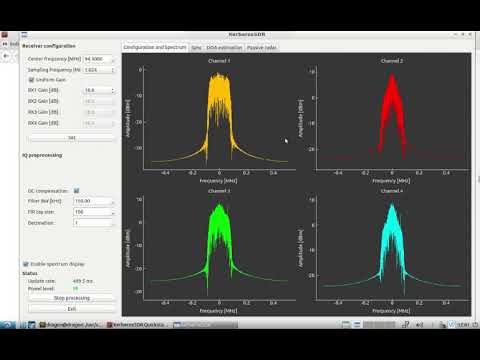
The tutorial goes through the KerberosSDR software install procedure, shows how to set up the various parameters in the software, and then demonstrates it providing data to the RDFMapper software via our open source pyRDFMapper-KSDR-Adapter program. With this setup, you could run multiple KerberosSDR units around a city and use them to locate a signal source rapidly.
In addition to the direction finding video he's got another video that shows how to use a KerberosSDR and HackRF to simultaneously monitor various signals like home gas meters, ADS-B data, and 433 MHz ISM band devices using programs like rtlamr, rtladsb and rtl_433. What's particularly interesting is how he uses a program called Kismet to manage each radio on the device.

