Building an RF Direction Finding Robot with an RTL-SDR
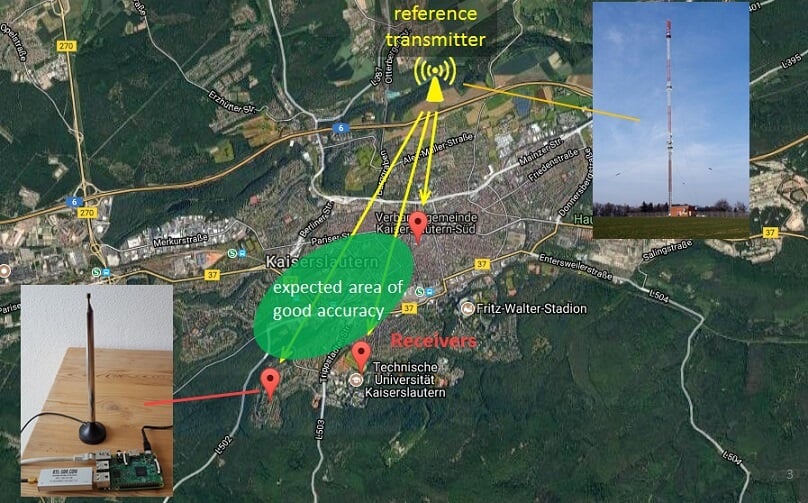
Over on Hackaday.io, project logger Humpelstilzchen has been writing about his attempts to create an autonomous RF direction finding robot RC car with an RTL-SDR. The goal is to set up an ISM band transmitter as a beacon, and use the RTL-SDR on the robot as the receiver. It will then use direction finding techniques to drive towards the beacon. The robot is a 4WD RC toy car with some autonomous navigational features like GPS, ultrasonic, IMU and vision sensors.
In his latest project log Humpelstilzchen describes his first semi-successful attempt at getting RF direction finding working. In the experiment he uses a 433 MHz module to send out an FSK beacon. On the robot two antennas are used for the time difference of arrival/pseudo-doppler direction finding technique, and PIN diodes are used to rapidly switch between the antennas. A GNU Radio script running on a HummingBoard single board computer computes the TDOA/pseudo-doppler algorithm.
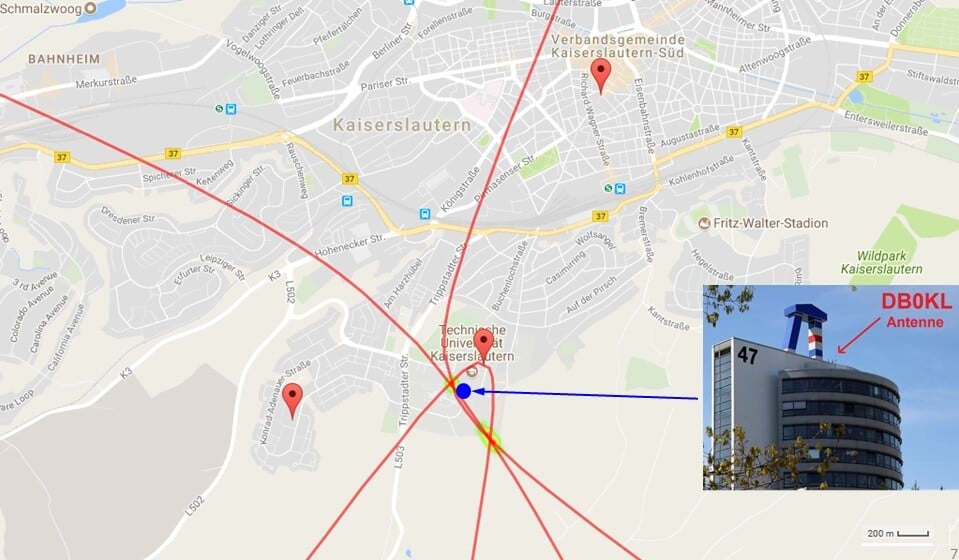
Psuedo-doppler direction finding works by rapidly switching between several antennas. The difference in the time that the signal arrives at each antenna can be used to calculate the transmitter's direction.
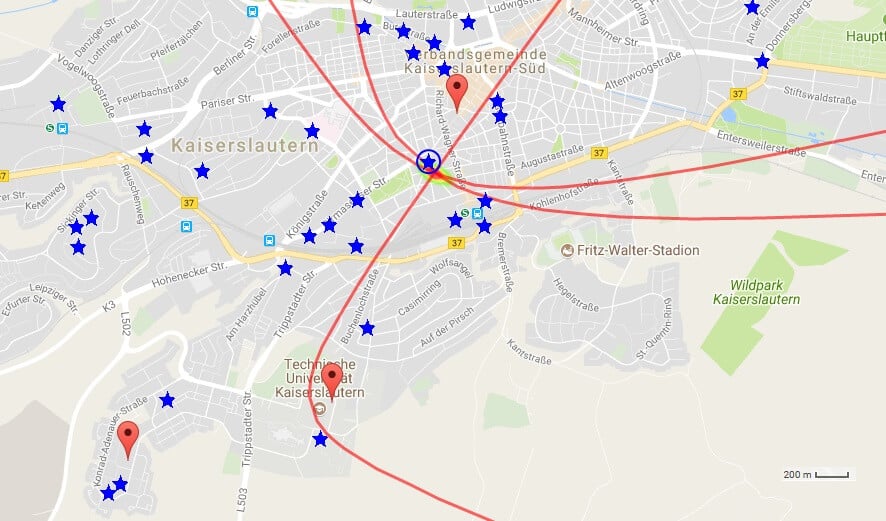
With the current set up he's been able to get the robot to distinguish if the beacon is closer to the left, or closer to the right, or equidistant. However, he notes that there are still problems with reflections of the beacon signal which can cause the robot to drive in the wrong direction.
This is still a work in progress and we look forward to his future results.