Creating a Passive Traffic Radar with DVB-T Signals and KerberosSDR our 4-tuner Coherent RTL-SDR
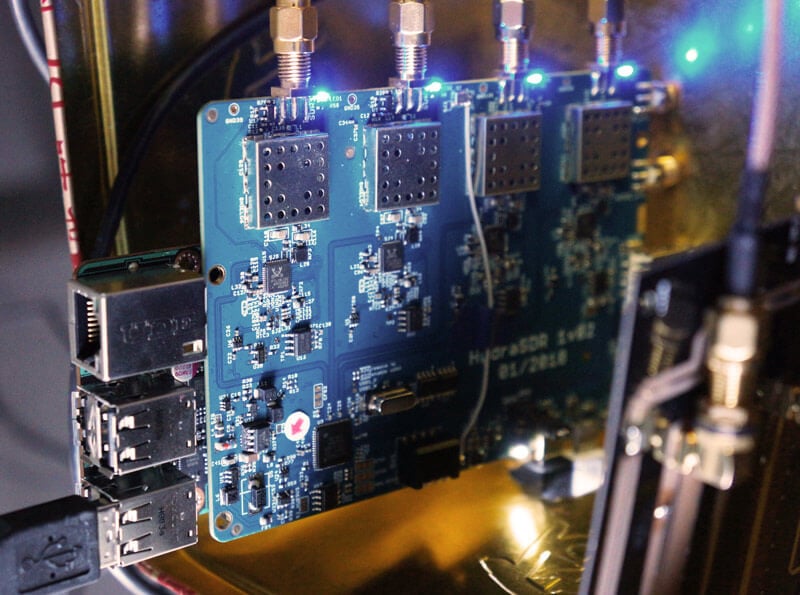
KerberosSDR is our upcoming low cost 4-tuner coherent RTL-SDR. With four antenna inputs it can be used as a standard array of four individual RTL-SDRs, or in coherent applications such as direction finding, passive radar and beam forming. More information can be found on the KerberosSDR main post. Please remember to sign up to our KerberosSDR mailing list on the main post or at the end of this post, as subscribers will receive a discount coupon valid for the first 100 pre-order sales. The list also helps us determine interest levels and how many units to produce.
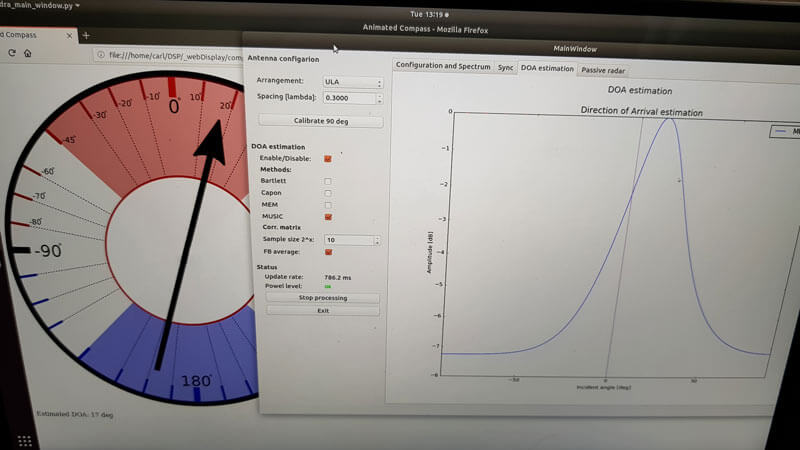
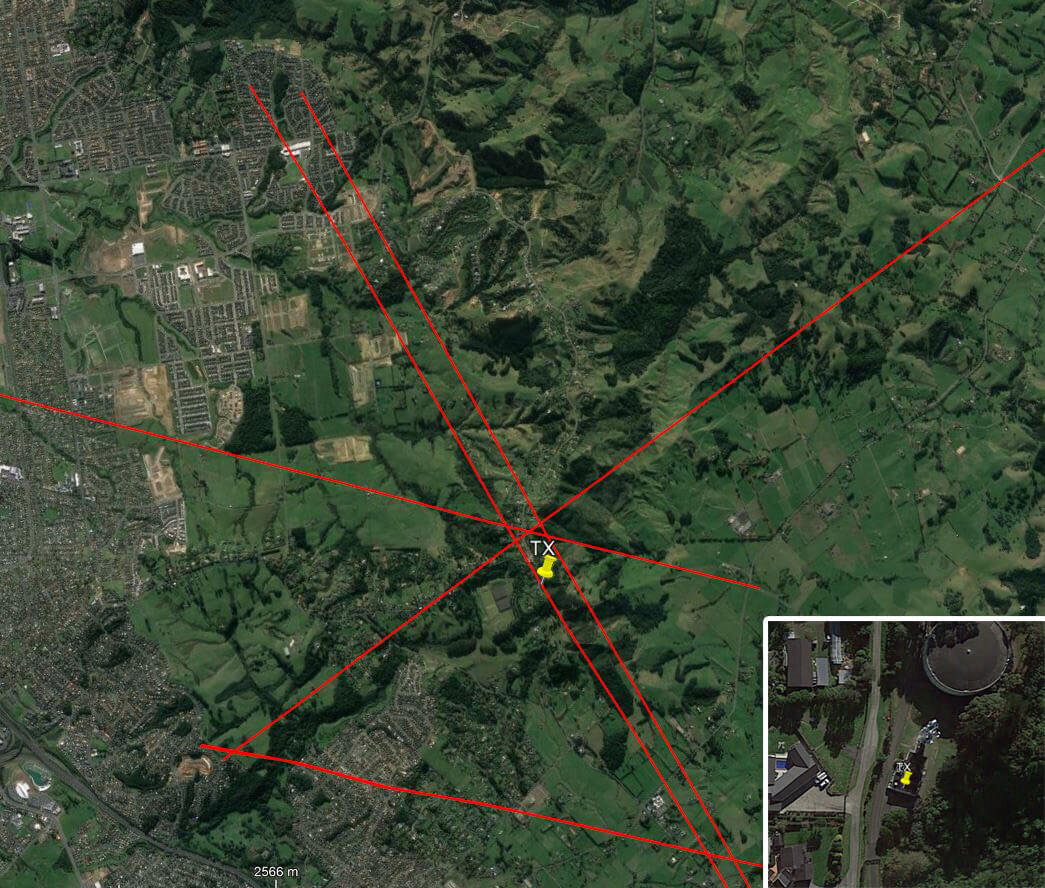
In this post we'll show KereberosSDR being used as a passive traffic radar. Passive radar works by using an already existing transmitter such as a FM, DAB, TV or GSM and listening to the reflections of those signals created by moving objects like aircraft, boats and cars. A simple passive radar consists of two directional antennas. One antenna points at the 'reference' transmitter (the transmitting tower), and the other towards the 'surveillance' area that you want to monitor. The result is a speed vs distance plot that shows all the moving objects.
For this test we parked our car to the side of a highway and pointed a cheap DVB-T Yagi antenna towards a DVB-T transmission tower, and another cheap Yagi down the road. The video shown below displays the results captured over a 5 minute period. The blips on the top half of the display indicate vehicles closing on our location (positive doppler shift), and the blips on the bottom half indicate objects moving away (negative doppler shift).


The resolution of each individual vehicle is not great, but it is sufficient to see the overall speed of the highway and could be used to determine if a road is experiencing traffic slowdowns or not. When larger vehicles pass by it is also obvious on the display by the brighter blip that they show. The display also shows us that the highway direction coming towards us is much busier than the direction moving away.
In the future we'll be working on optimizing the code so that the display updates much faster and smoother. It may also be possible in the future to use the third and fourth tuners to obtain even greater object resolution.