RTL-SDR Blog Review of the HydraSDR
HydraSDR is a soon to be released software-defined radio based on the same design as the popular Airspy R2 SDR. However, compared to Airspy, HydraSDR claims to have "Enhanced PCB layout and RF front end with superior power/noise filtering, improved temperature dissipation and peak temperature management," as well as various other improvements. HydraSDR also has the distinction of being made in the USA, whereas Airspy is made in China.
Recently, Benjamin Vernoux, creator of HydraSDR and former collaborator on the Airspy R2 project, sent us a review unit of the HydraSDR. This post is a review of the HydraSDR. However, because the HydraSDR is based on the Airspy R2 and competes directly with it, the two units will be heavily compared.
HydraSDR is launching on Digikey.com for US$189 and the Airspy R2 is available from iTead and other distributors for US$169.

Design Review
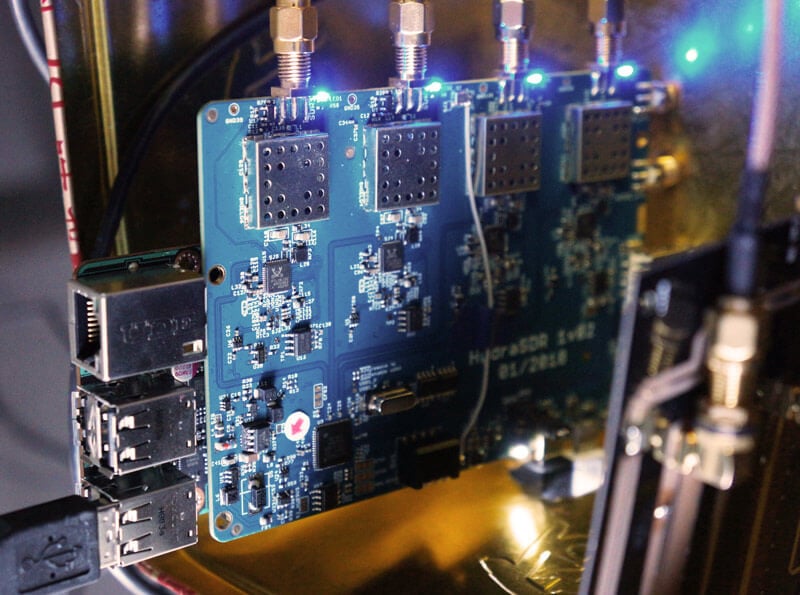
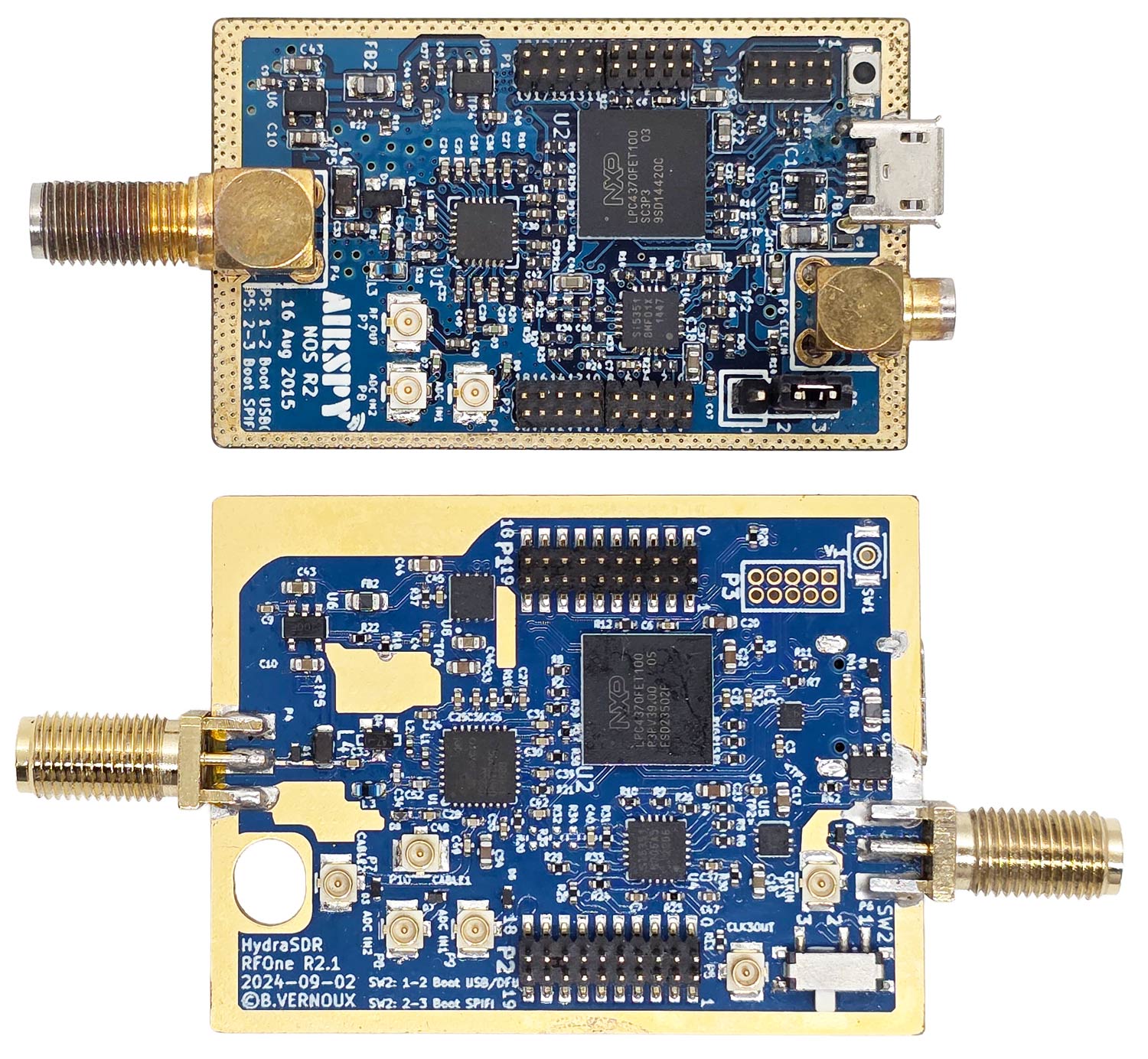
The design of the HydraSDR is very similar to the Airspy R2, which is already known to be a high-performing SDR. Both are based on the LPC4370 microcontroller and its built-in ADC, and they both use similar firmware. The circuit layout, from the top and bottom views, is also almost identical. Benjamin notes that the internal layout has been improved and that several components, such as LDOs, have been upgraded to better ones with reduced noise.
One larger change is that HydraSDR uses a Rafael R828D tuner, instead of the Rafael R860T tuner that the Airspy uses. Both tuners are very similar in terms of operation and performance as they are based on the same design and technology. The R828D has two additional RF input pins; however, on the HydraSDR, they are unused but are routed to two uFL connectors on the bottom of the PCB for advanced users.
Both the HydraSDR and Airspy come in a black anodized aluminum extruded enclosure. The Airspy's enclosure is more compact, but the HydraSDR enclosure is purposely oversized to accommodate up to three HydraSDR PCBs.
However, additional holes for two extra SMA ports and two extra USB-C ports have not been pre-drilled, so we assume the 3x unit may be a separate product coming out in the future. The HydraSDR also utilizes an SMA port for the optional CLK-IN port, unlike the MCX port on the Airspy.

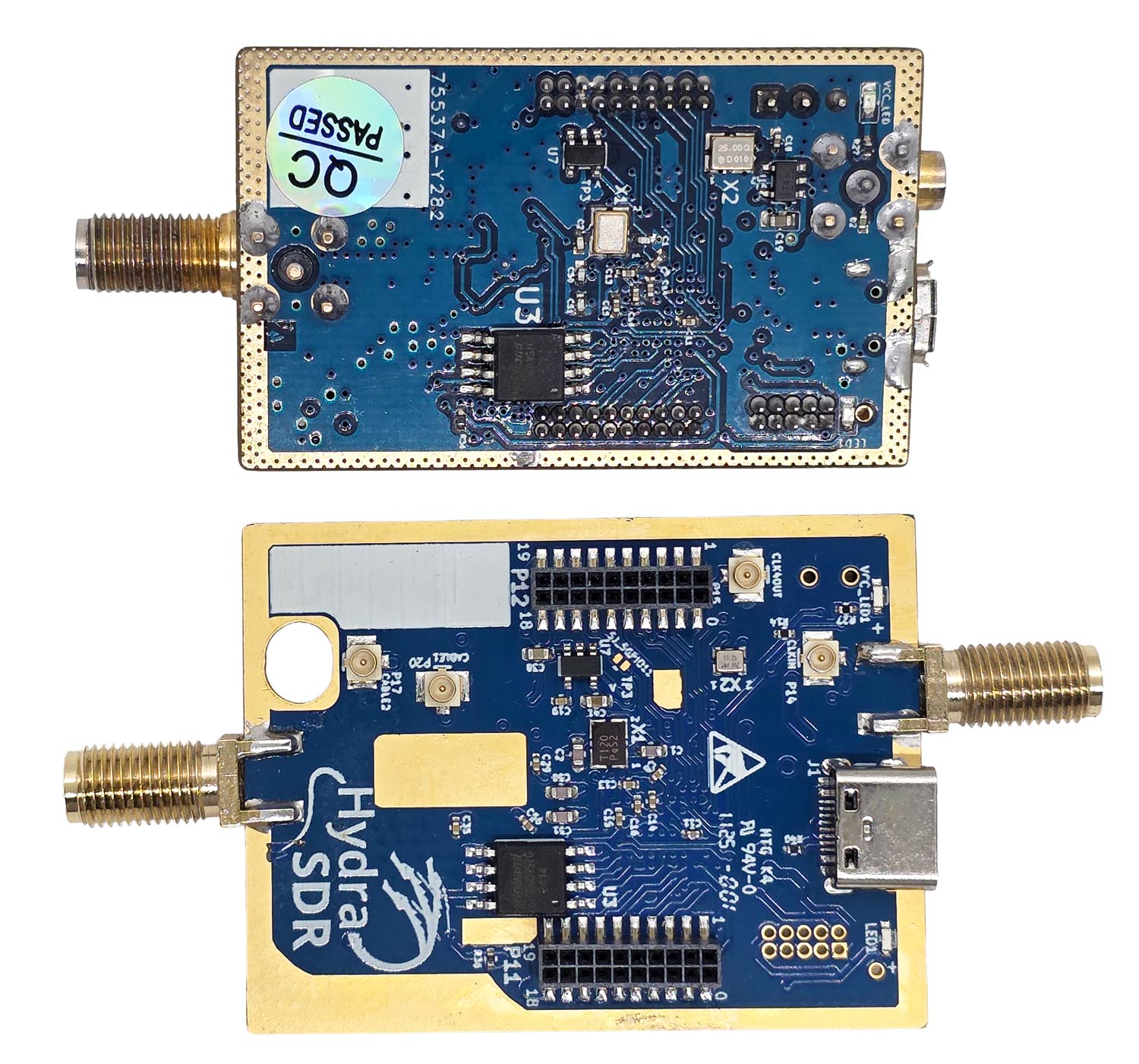
A major win for the HydraSDR is its use of a USB-C connector, whereas the Airspy R2 still uses a micro USB connector. (We note that it is a USB-C connector, but not USB3.0, it is still USB2.0).
The microUSB connector on the Airspy R2 is less robust and can easily disconnect if bumped, even with brand-new cables. The connection on the HydraSDR is rock solid, and no amount of reasonable bumping of the cable can disconnect it.
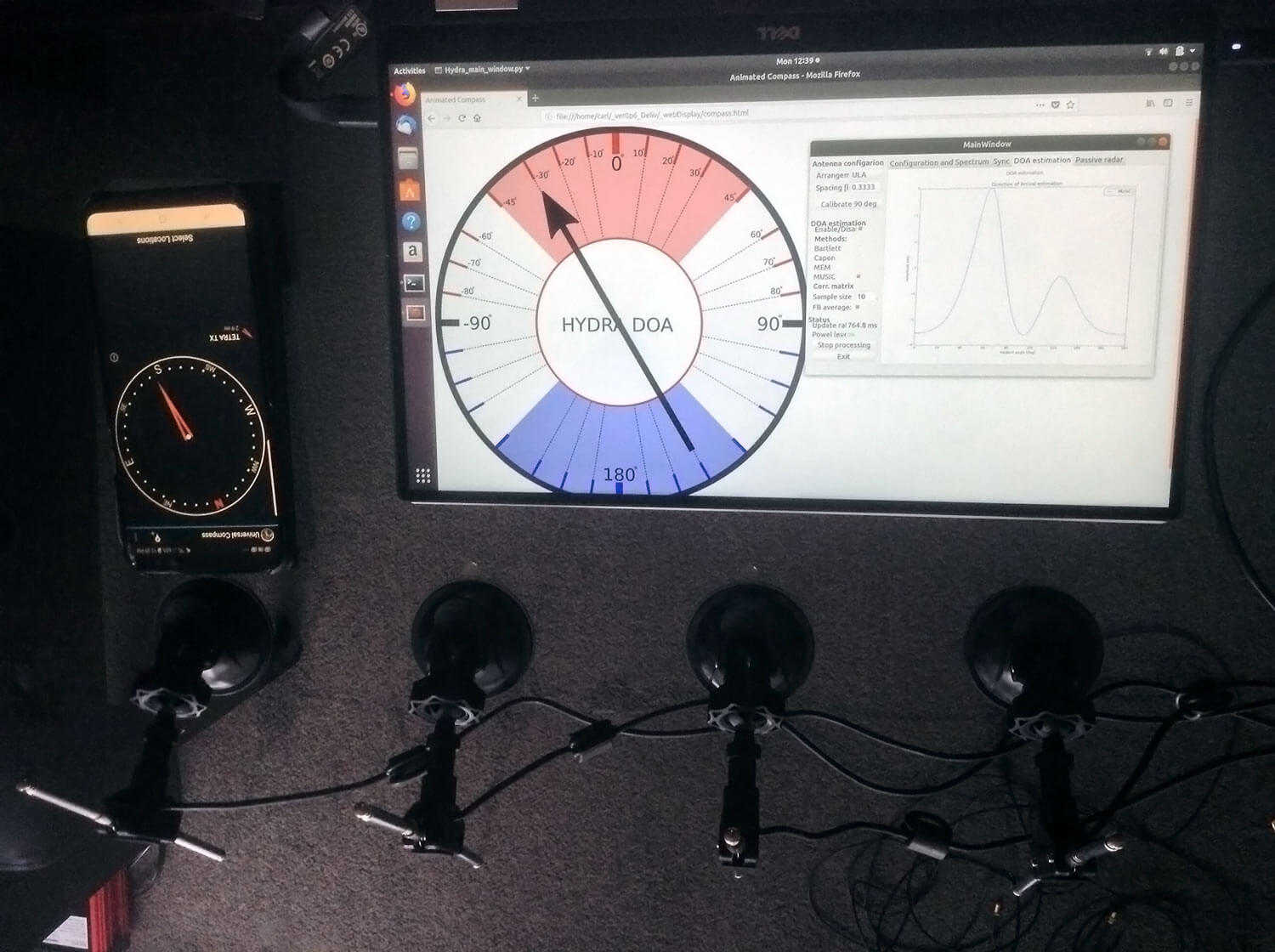
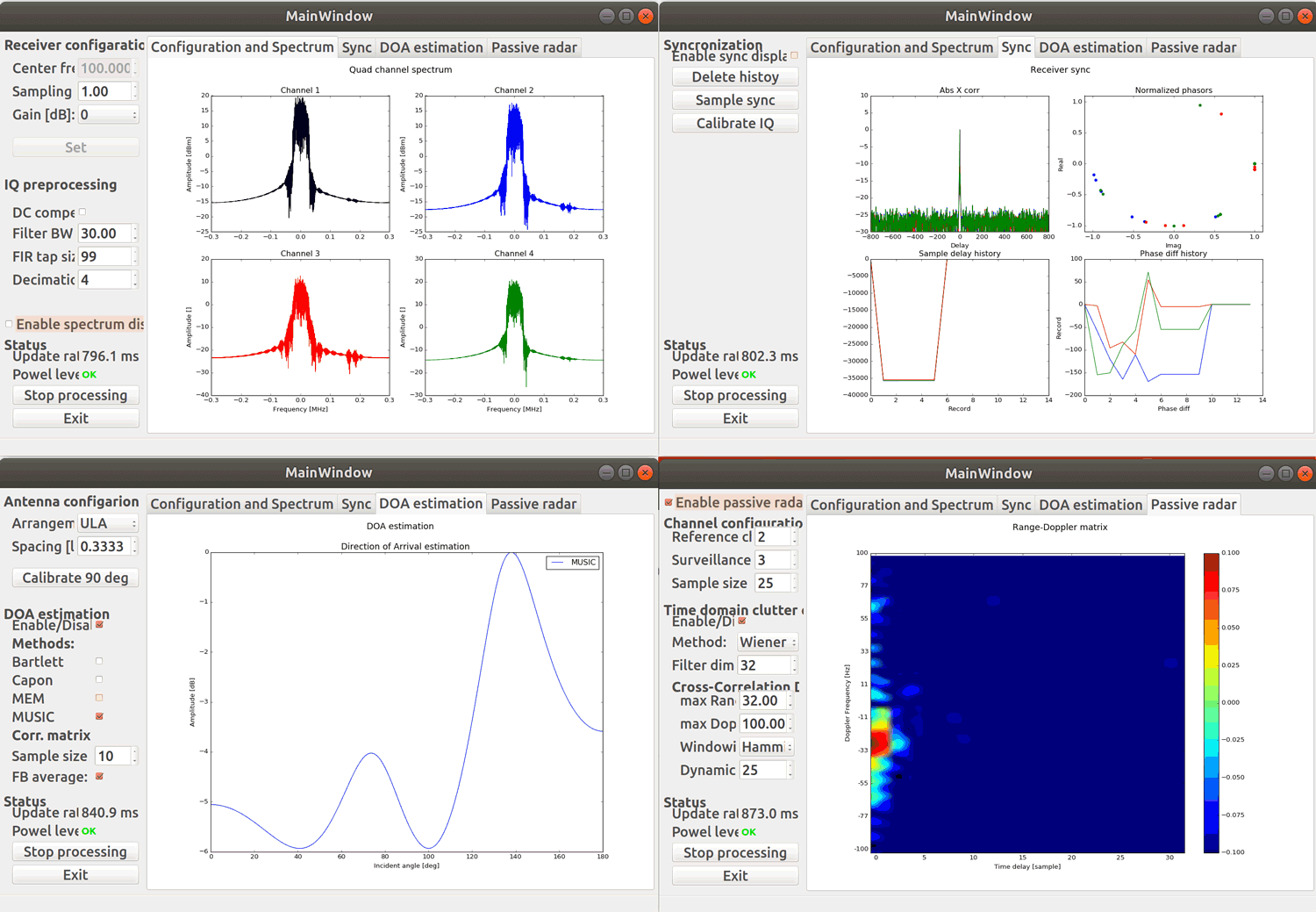
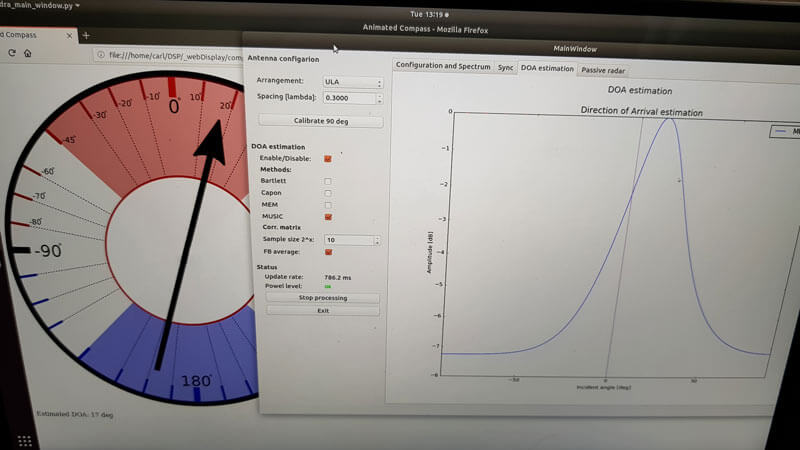
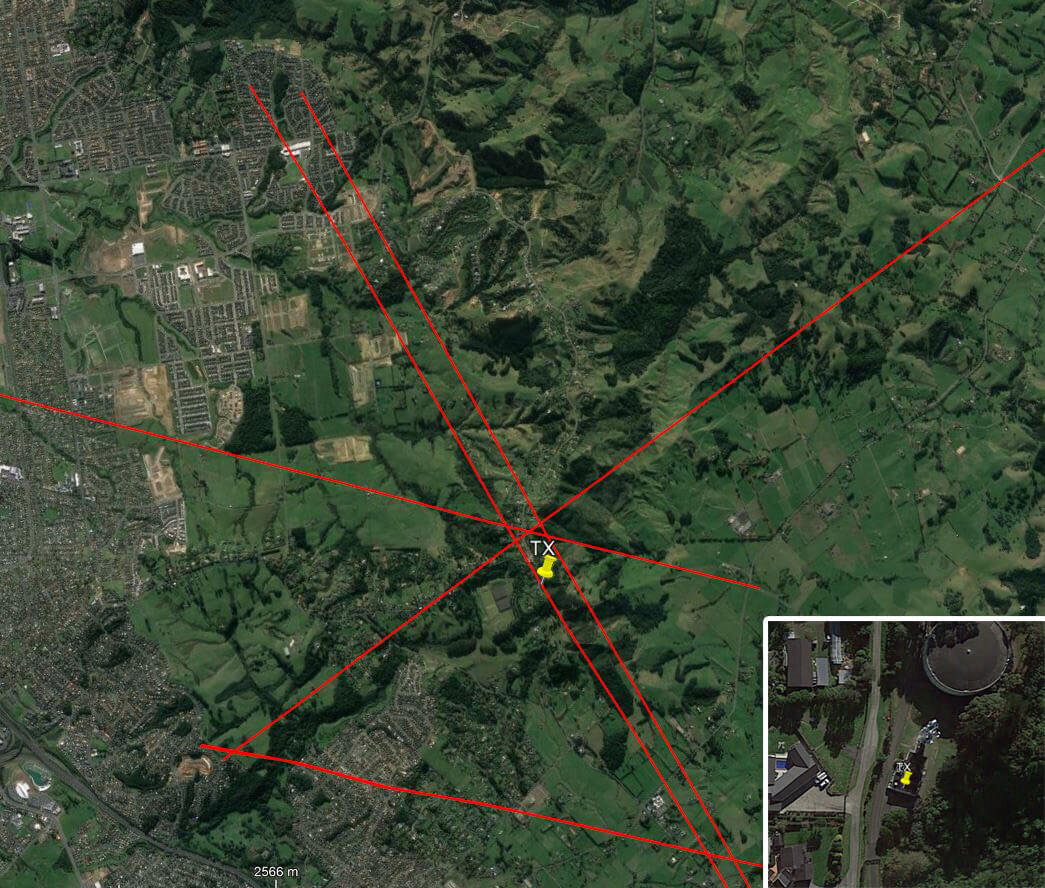
The HydraSDR spec sheet also mentions its suitability for phase-coherent applications, such as radar. However, although you can run all three from the same clock, from what we can see, specialized firmware, software, and external signal and/or noise source hardware would still be required for sample and phase alignment, as the system can not be naturally coherent. We're unsure whether the company will be directly supporting coherent use cases or if coherence is left as an exercise for the customer.
Software
Both Airspy and HydraSDR use the same USB VID/PID identifiers, so most software should recognize them as the same device.
We decided to see if it would run in SDR#, the official software of Airspy. Upon selecting the device as an Airspy R2 in SDR#, we were able to see it work and operate just like a genuine Airspy R2.
This is interesting because in SDR++, the software recommended by HydraSDR, selecting Airspy R2 as the device results in the device being unable to connect. Currently, SDR++ does not support HydraSDR in its latest releases; however, support is being developed.
For now, until SDR++ officially supports HydraSDR, Benjamin has released a custom fork of SDR++ that will be available on the HydraSDR website.
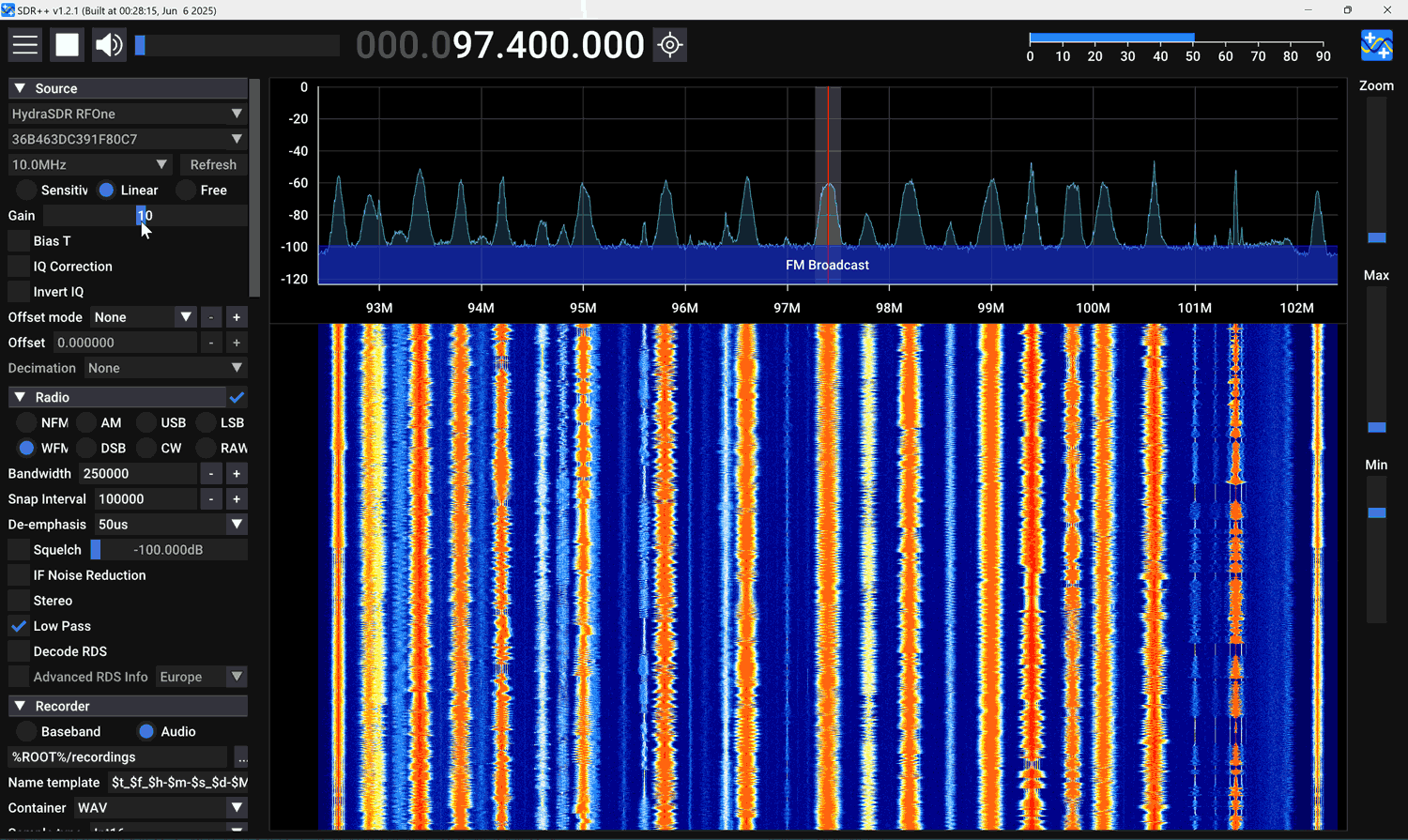
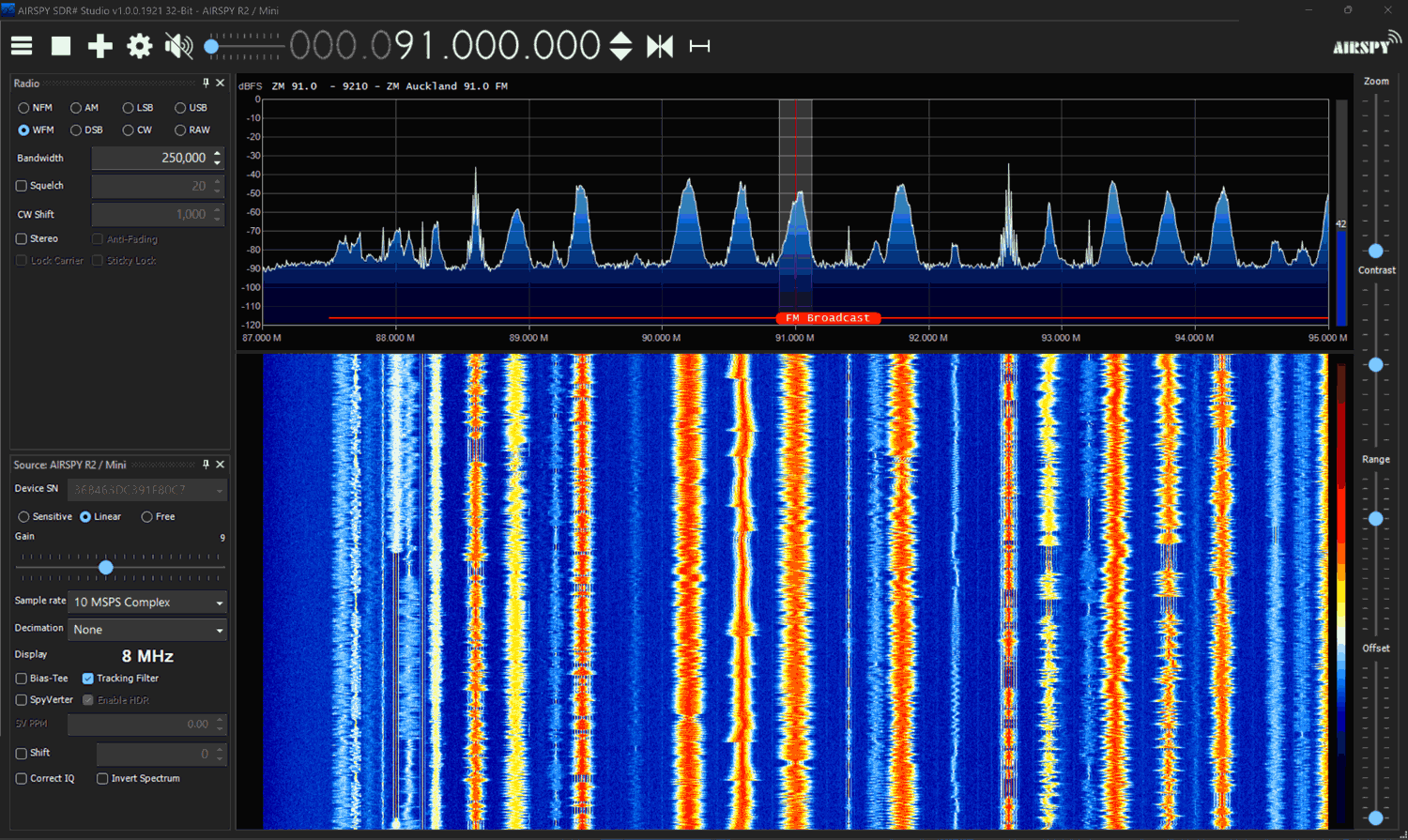
We note a few differences between SDR++ and SDR#. SDR# restricts the visible bandwidth of Airspy devices to 8 MHz, as this hides the edges, which contain aliased signals. SDR++ does not hide the sides. SDR# also has an 'HDR' (high dynamic range) mode for Airspy devices, whereas SDR++ does not. More on HDR mode is discussed under the testing heading.
When HDR mode was turned OFF, no differences in performance between SDR# and SDR++ were noticed.
We are also aware that HydraSDR is now supported by gr-osmosdr (GNU Radio source block), SatDump (satellite decoding software), and URH (Universal Radio Hacker).
We also found that HydraSDR runs as an Airspy in SDR-Console V3. Official Airspy software, such as SpyServer and adsb_spy, also work with HydraSDR. We suspect that most software that supports the Airspy will be compatible.
Testing
No Antenna Test
In this test, we connected each SDR to a dummy load and used SDR# to look for signals. If the SDR is shielded well, no signals should be received.
We noticed that the HydraSDR has excellent shielding and is very well protected against signals entering through paths other than the antenna. The Airspy was able to receive a strong TV channel without any antenna, indicating that it has shielding issues.
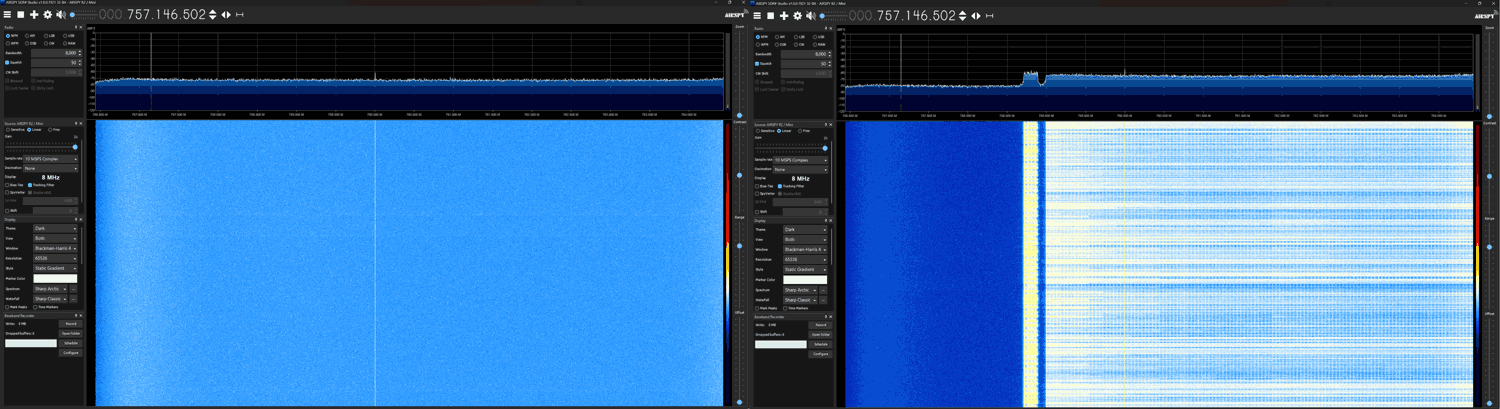
Across the spectrum, the HydraSDR also has a cleaner spectrum with lower power levels on most internal spurs.
Real World SNR Tests
In this test, we received real-world signals with each SDR connected to a roof-mounted Discone, which was in turn connected to a splitter. We increased the gain settings to optimize each SDR for best SNR, which is typically just before it overloads and creates images.
We noticed that the gain distribution on the HydraSDR was slightly different from that of the Airspy, as the HydraSDR would overload on a lower gain setting compared to the Airspy. When optimizing for SNR we found that a gain setting 1-3 notches higher on the Airspy was required.
Once optimized, we found that results were very similar, with a slight 0.5 - 1 dB sensitivity edge going to the HydraSDR; however, this may be within chip-to-chip variances, so we can't say for certain if one is more sensitive than the other.

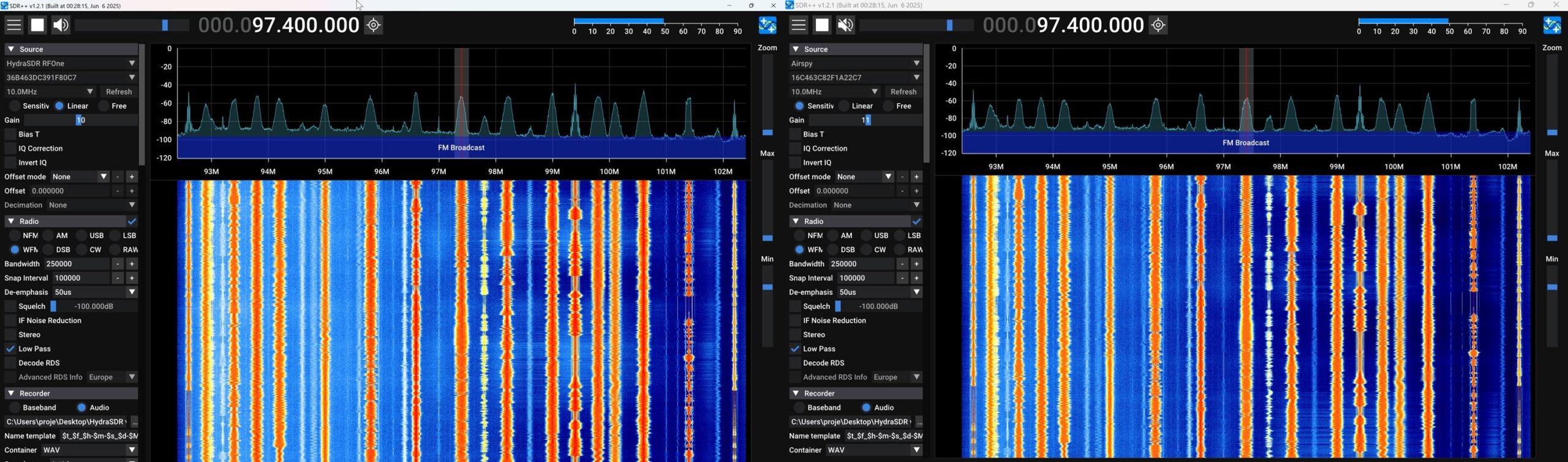

Real World Comparison SDR++ vs SDR# 1921
HydraSDR recommends using SDR++, whereas Airspy recommends using the Airspy native software SDR#. While HydraSDR currently works on SDR#, we're not sure if this will continue, as SDR# could possibly block the use of clones and spinoffs. So, it seems fair to compare HydraSDR with SDR++ and Airspy with SDR#.
Under normal operation, with moderate strength signals, both programs appear to give nearly identical performance in terms of audio quality and signal SNR.
However, Youssef has pointed out that SDR# (and SDR-Console) has a special mode called HDR (high dynamic range) available for Airspy products. HDR mode works by optimizing the DSP chain specifically for the Airspy hardware whenever decimation is used. With HDR mode on, we can push the gain setting much higher than we would have otherwise without experiencing overload, resulting in a better SNR.
We are currently aware that only SDR# and SDR-Console V3 implement the Airspy HDR mode tweaks, and SDR++ does not.
Comparing performance between two different programs can be a bit tricky because each uses a slightly different FFT algorithm, resulting in different SNR values being calculated. SDR++ consistently calculates a somewhat higher SNR for the same signal.
To illustrate the effect of the Airspy HDR mode, we will use two SDR# instances and disable HDR mode for the HydraSDR, simulating the effect of using it in SDR++, which does not have HDR mode.

This test showed a rather dramatic +7 dB improvement with HDR mode on. With HDR mode on we were able to increase the gain much further without overload. In the screenshot we increased the gain as far as possible to optimize the SNR on each receiver as much as possible.
For an audio comparison that directly compares Airspy on SDR# vs HydraSDR on SDR++, here is an audio file of the Airspy running SDR# with HDR mode ON, 16x decimation, receiving a weak signal sandwiched between strong signals.
And here is the audio file of SDR++ with 16x decimation receiving the same signal.
Both signals were optimized for the best SNR possible, which was just before the SDRs overloaded and displayed intermodulation products. There is a clear difference in audio quality that can be heard, with SDR# emerging as the winner. Note that these HDR improvements may only be seen in a high dynamic range environment (when strong signals are mixed with weak signals) and when decimation is used .
Conclusion
With the Airspy R2 starting to feel a bit dated, the HydraSDR looks to be a great addition to the choice of available SDRs. However, we consider it to be essentially a spinoff of the Airspy with some minor changes made to improve performance and usability. The improved shielding and USB-C port are particularly notable enhancements that we love. Compared against the Airspy, HydraSDR is clearly the better hardware choice.
But if you already have an Airspy R2, there are not enough improvements here to consider the HydraSDR as a next-generation upgrade worth purchasing. That said, if you're looking for a new SDR made in the USA, the HydraSDR should be on your radar.
The Airspy maintains some software advantages, such as official software support and compatibility with SDR#’s and SDR-Consoles HDR mode, which excels in strong signal environments. However, the HydraSDR is directly compatible with the Airspy and currently functions as one in SDR#, allowing it to benefit from HDR mode as well. But this compatibility relies on SDR# not actively blocking it.
We also note that Benjamin wants to emphasize that HydraSDR is not designed for use with SDR#, and only SDR++ and other HydraSDR software should be used with it.
Disclaimer
We have no financial interests in either Airspy or HydraSDR (apart from reselling the YouLoop). The Airspy R2 used in this review was provided to us back in 2015 as a free review unit, and HydraSDR was provided to us recently as a free review unit. Transparency note: Certain parties have claimed that we gave an unfair review to the HydraSDR because they claim that we take referral credit from sales of Airspy units. This is not true. Several years ago, when Airspy was the only recommended upgrade to the RTL-SDR, we briefly trialed a referral program with Airspy, but that program ended many years ago. Any leftover referral links from old blog posts are no longer active. The only Airspy product we sell on our store is the YouLoop antenna, which is unrelated to the SDRs themselves. Some parties have also pointed out that parts of the original review have been removed, and they claim a lack of transparency from the blog. We value transparency above everything; however, we cannot comment further on this matter at this time.