GridDown: An Offline-First Situational Awareness Platform with RTL-SDR, SARSAT, Meshtastic
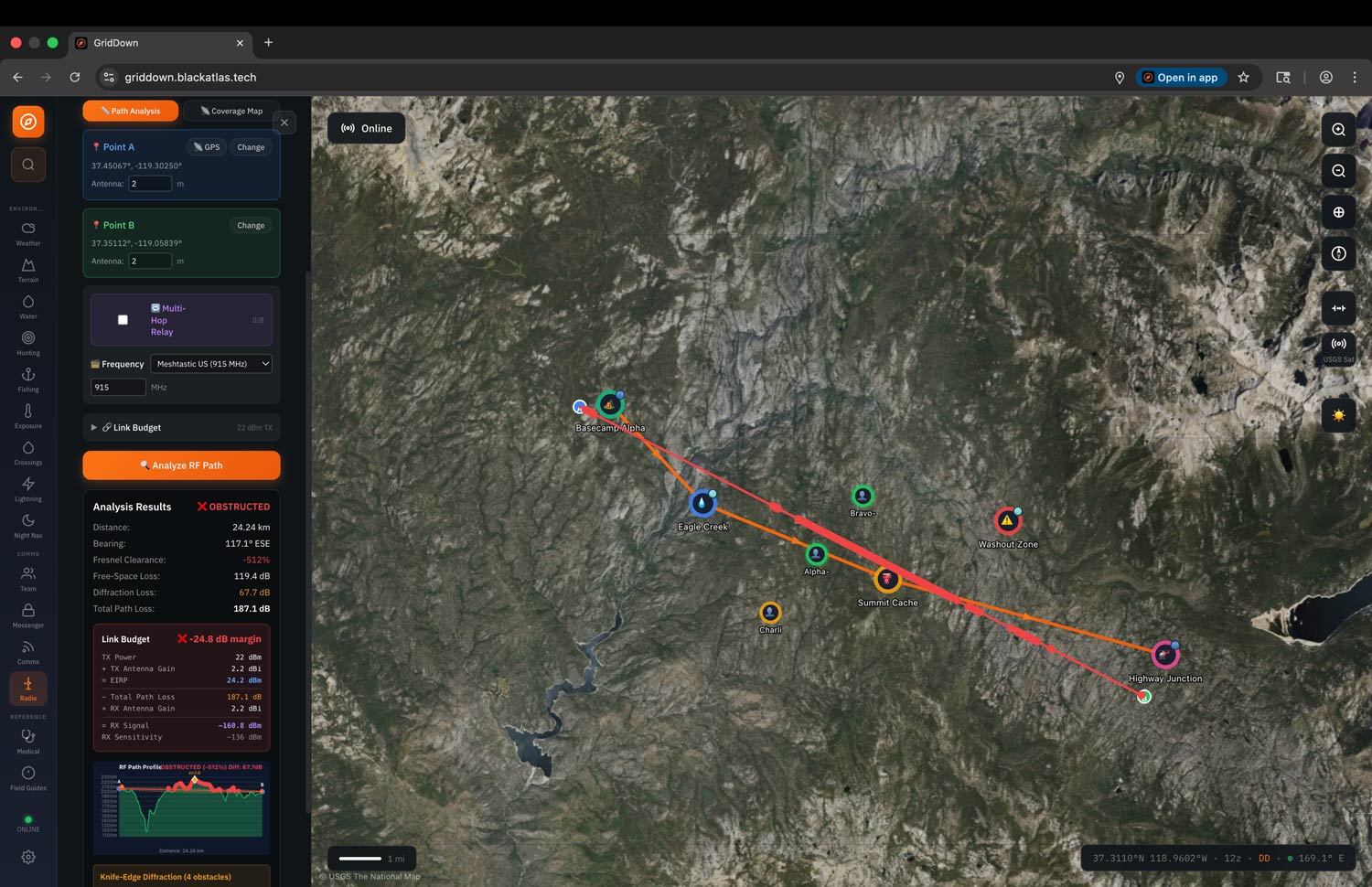
Thank you to Cameron from BlackAtlas LLC for submitting their project GridDown, which is an open source Android tablet-based situational awareness system designed to operate without an internet connection. At its core, it appears to be a tablet with custom software, and then you can add sensors such as an RTL-SDR for ADS-B+Remote ID, a SARSAT receiver, and a Meshtastic ESP32-S3+SX1262 device. A demonstration of the UI can be found at https://griddown.blackatlas.tech.
Cameron writes:
[GridDown is] an offline-first situational awareness platform built for emergency preparedness, field response, and tactical operations in infrastructure-degraded environments — designed to work when cell towers are down, internet is unavailable, and operators are fully off-grid.
The platform is a Progressive Web App (~120,000 lines of vanilla JavaScript, no frameworks) that runs on Samsung Galaxy tablets, laptops/PCs, and works completely offline after initial setup. It's built by BlackAtlas LLC and is available for trial at https://griddown.blackatlas.
tech.
The system has many facets to it, including:
- Encrypted voice and text messaging via an ESP32-S3 with SX1262 LoRa transceiver
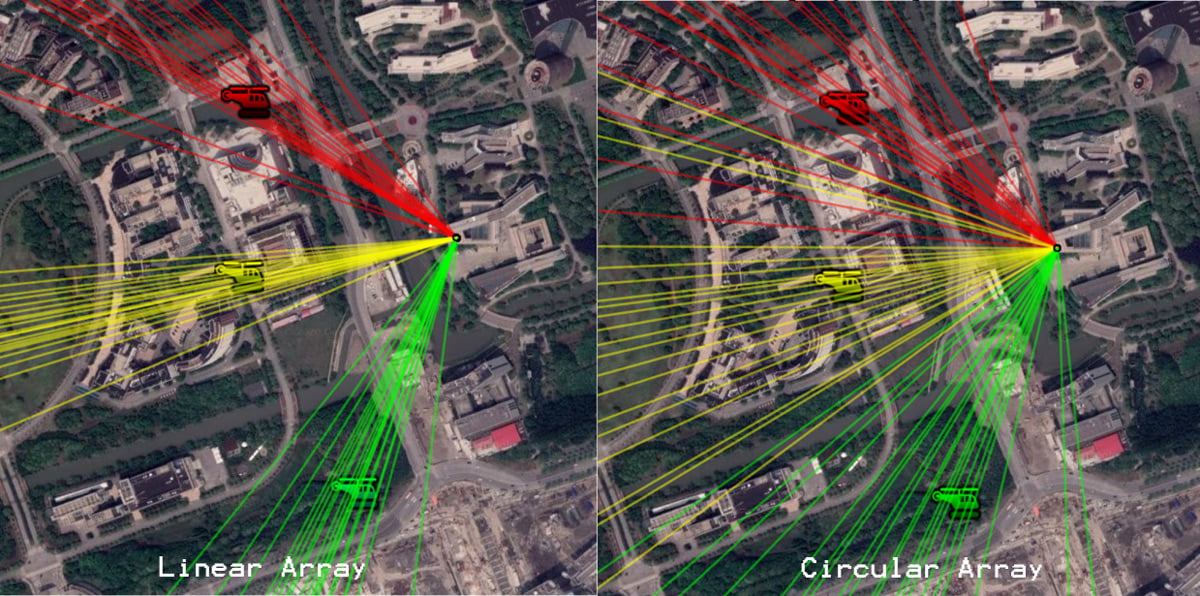
- Passive RF sensing with the ESP32-S3 and SX1262.
- Three passive drone detection methods: WiFi fingerprinting, FAA Remote ID reception, and 900 MHz control/telemetry link detection
- Automatic gunshot detection via a ES7210 quad-channel I2S microphone on the ESP32-S3.
- Automatic RF jamming detection
- SARSAT beacon receiver
- SSTV Encode/Decode
- Meshtastic integration
- APRS via Bluetooth TNC
- ADS-B reception
- RadioCode gamma spectrometer integration
- Offline maps
ADS-B detection is handled by a Raspberry Pi 5 running an RTL-SDR Blog V4 dongle. Cameron writes:
The Pi connects to the tablet's built-in WiFi hotspot (no internet required — the hotspot functions as a local network only), and a Node.js bridge reads aircraft data from readsb and subscribes to the Remote ID receiver's MQTT output, then serves a unified WebSocket and REST API to the tablet. GridDown renders aircraft and drone tracks as heading-rotated silhouette icons on its offline map with altitude labels, age-based alpha fade, and emergency squawk alerting (7500/7600/7700). A 10,000 mAh USB-C PD battery provides approximately 5 hours of field runtime for the Pi.
The full setup script, hub bridge, and hotspot connection scripts ship with the project.
The software is dual-licensed, with it being open source GPL v3 (note that the GitHub link appears to be broken - we have asked for clarification) for non-commercial use, or a commercial licence for hardware bundles and business deployments.
Alternatively, BlackAtlas LLC is selling ready-to-use kits, with the core tablet coming in at $799. Other bundles include the Tablet + SARSAT receiver for $1,299, the Tablet + Meshtastic bundle for $1,299, and the Tablet + ADS-B/Remote ID bundle for $1,999.