Rigflow: A Networked HF SDR Transceiver App in Rust with Real-Time DSP Over UDP
Thank you to David Bourgoyne (KK7TCY) for submitting news about his new software called Rigflow, an open source client/server SDR application for amateur radio written in Rust and released under the MIT license.
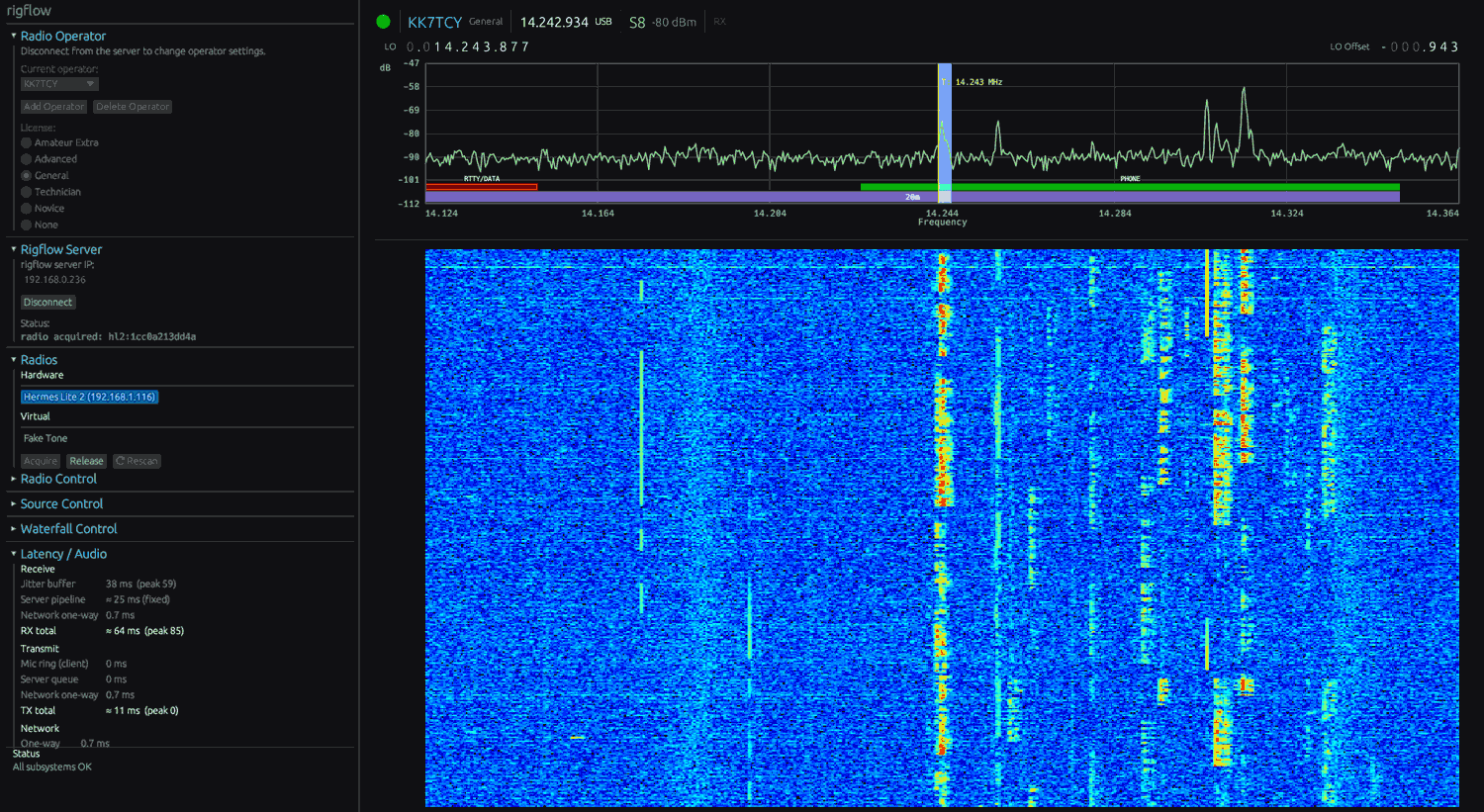
The core idea behind Regflow is to split the radio from the operating position over the network. A lightweight server owns the radio hardware and DSP and runs on a low-power machine right at the antenna, such as a Raspberry Pi, while a desktop client provides the spectrum and waterfall display, tuning, and controls. The two communicate over a small WebSocket control channel plus UDP for media, so you can sit anywhere on the network, and one client can work with multiple radios.
For receivers, the RTL-SDR is supported as a source, including direct sampling HF, and you get WFM, NFM, AM, SSB, CW, and Data modes, a real-time spectrum and waterfall, NR2 noise reduction, AGC, squelch, bookmarks, amateur band and privilege overlays, and IQ recording and playback. Paired instead with a TX capable Hermes Lite 2, the software also transmits, with SSB from your microphone, CW via straight key or text to CW macros, and digital modes like FT8 through WSJT-X over virtual audio or TCI. There is also optional Hardrock-50 amplifier control with band tracking, ATU and SWR/power monitoring over USB serial.
Rigflow can be run on Linux(x86/x64) and Raspbery Pi/ARM as well as MacOS. Prebuilt binaries are available on the GitHub Releases page.